Figure C – 16: Set LiDAR information successful.
Note 1: during the process of parameter setting, please not cut off the power supply.
Otherwise, the internal parameters in LiDAR will be incorrectly saved.
Note 2: if the MSOP Port or the DIFOP Port is modified, please set the Data Port in
RSView first according to following section C.8 before reconnecting device.
C.8 Setting RSView Data Port
The MSOP Port by default is 6699, and the DIFOP Port is 7788. If one of the two
parameters or both of them has been changed (just like the description in section C-7), the
new Data Port in RSView must be set and refreshed. Otherwise, the data won’t be
displayed. If the MSOP Port and DIFOP Port in RS-Bpearl are unknown or forgotten, user
can utilize the software Wireshark to capture the data packet from Dst Port.
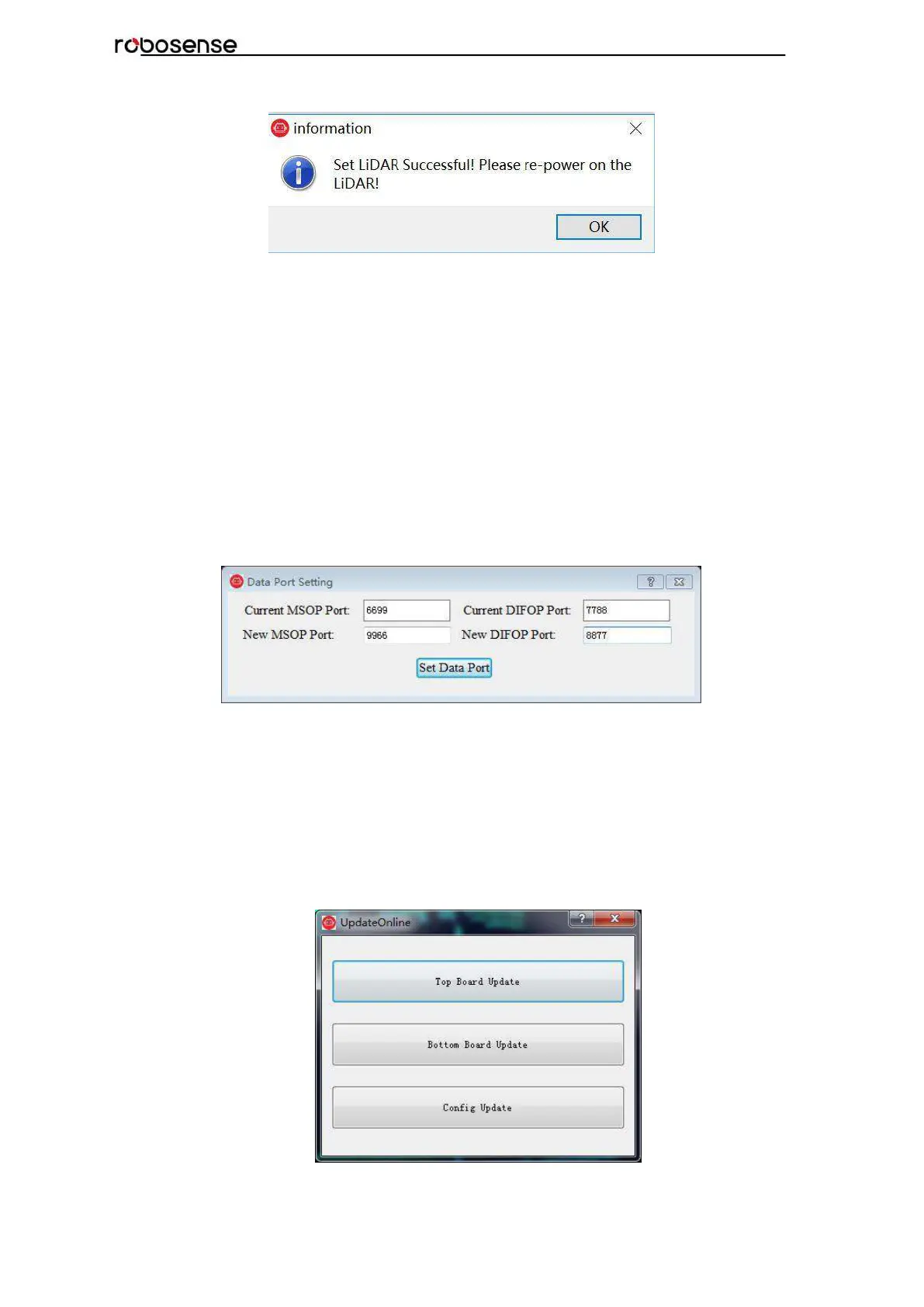
Click Tools > Data Port, type the MSOP Port and the DIFOP Port changed, then click Set
Data Port.
Figure C-17: Set Data Port.
C.9 Firmware Update Online
Please ensure the connectivity of LiDAR, and point cloud can be displayed and get the
firmware information according to section C.8.
Click Tools > Online Update, as shown in Figure C-18, top board update and bottom board
update could be selected.
Figure C-18: Online Update.