1-6
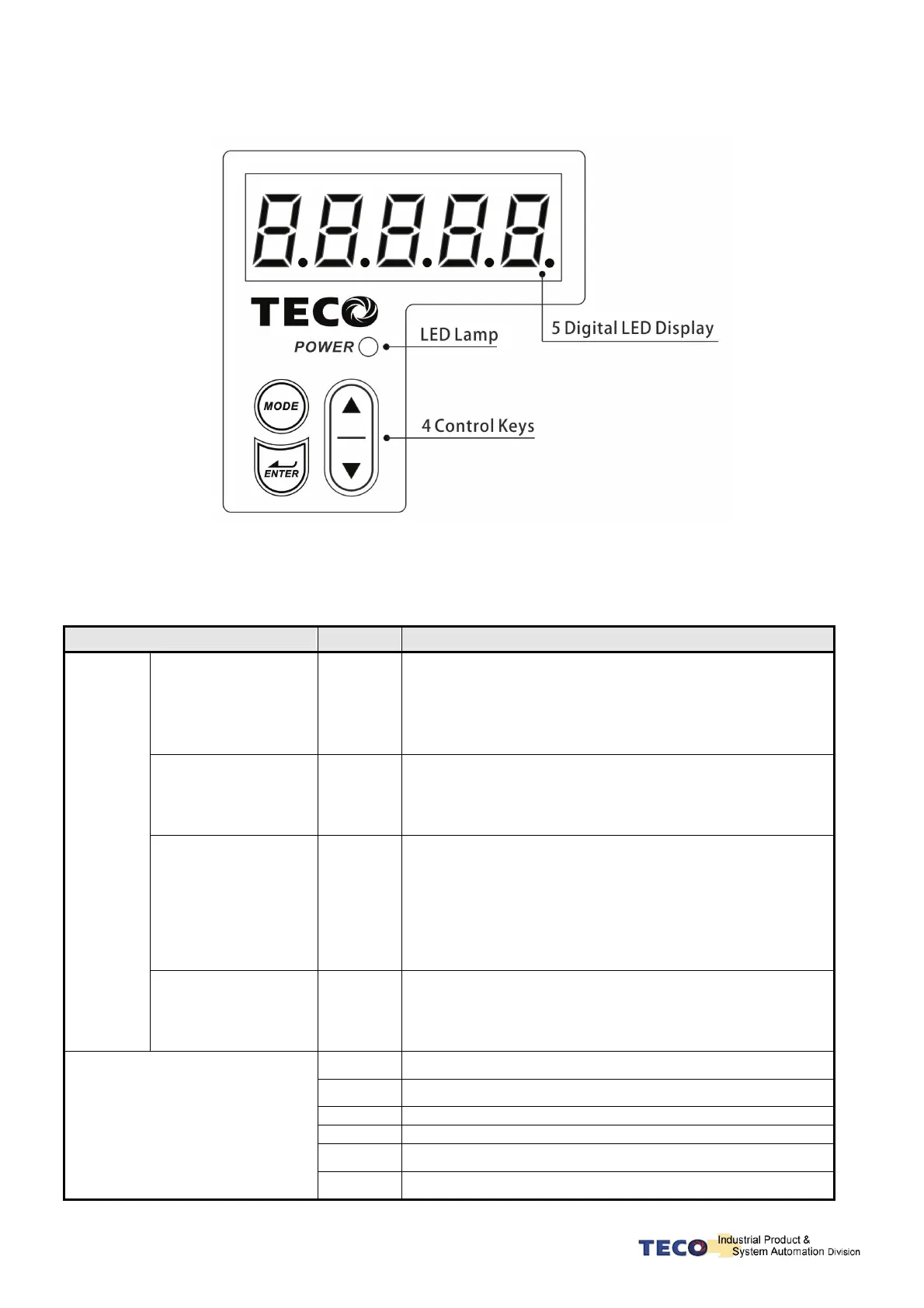
Key Board
1-3 A Brief Introduction of Operation for Drives
There are many kinds of control-mode. The detail modes display as fellow:
Name Mode Explanation
Position Mode
(External Pulse
Command)
Pe
Position control for the servo motor is achieved via an external
pulse command. Position command is input from CN1.
Position Mode
(Internal Position
Command)
Pi
Position control for the servo motor is achieved via by 16
commands stored within the servo controller. Execution of the
16 positions is via Digital Input signals.
Speed Mode S
Speed control for the servo motor can be achieved via
parameters set within the controller or from an external analog
-10 ~ +10 Vdc command. Control of the internal speed
parameters is via the Digital Inputs. A maximum of three steps
speed can be stored internally.
Single
Mode
Torque Mode T
Torque control for the servo motor can be achieved via
parameters set or from an external analog -10 ~ +10 Vdc
command.
Pe-S
Pe and S can be switched by digital-input-contact-point.
Pe-T
Pe and T can be switched by digital-input-contact-point.
Pi-S Pi and S can be switched by digital-input-contact-point.
Pi-T Pi and T can be switched by digital-input-contact-point.
S-T
S and T can be switched by digital-input-contact-point.
Multiple Mode
Pe-Pi Pe and Pi can be switched by digital-input-contact-point.
 Loading...
Loading...

