5-68
5-6-6 CW/CCW Drive Inhibit Function
z Stopping method of the servo motor as a result of CW/CCW Inhibit function can be
selected according to the list below:
Parameter Name Setting Description
Control
Mode
0
When torque limit reached the setting value of
(Cn010,Cn011), servo motor deceleration to
stop in the zero clamp status.
★
Cn009
CW/CCW drive
inhibit
2
Once max torque limit (± 300% ) is detected then
deceleration to stop with zero clamp.
ALL
New setting will become effective after re-cycling the power.
Note!
When the Drive Inhibit occurs in CCW/CW, the Cn009 has the higher priority than Cn008.
Example:
If Cn008 is set to 0 or 1 which means (without Dynamic Brake).
BUT Cn009= 1 (with Dynamic Brake), then the dynamic brake will be effective( enabled).
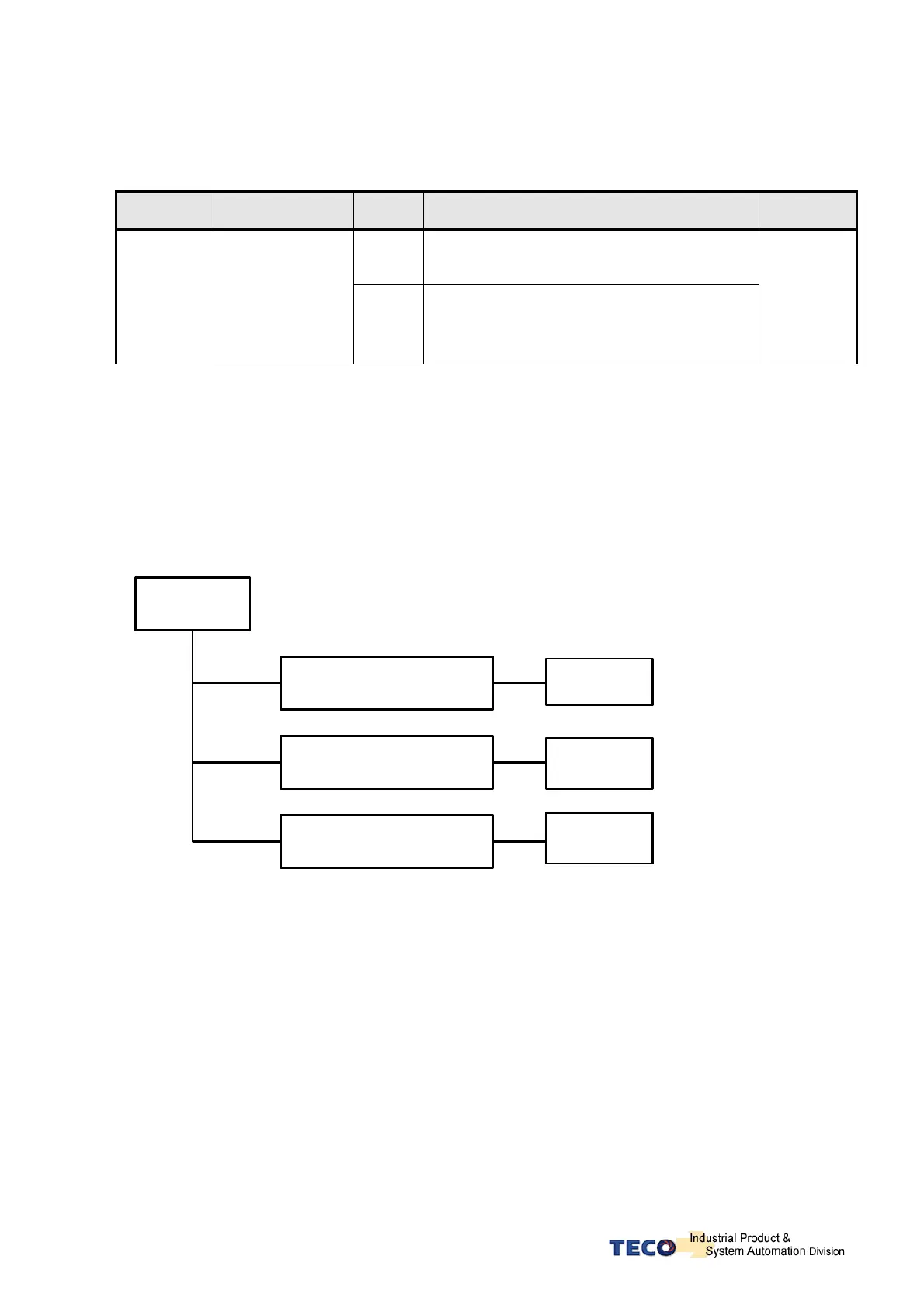
300% of Torque Limit
Decelerating
Zero Clamp
Cn009=0
Cn009=1
Cn009=2
Deceleration Mode
After Stopping
Dynamic BK
Decelerating
Dynamic BK
Zero Clamp
The Servo Power
needs Restart
Torque Limit (Cn010,
Cn011) Decelerating
CW/CCW
Drive Inhibit
 Loading...
Loading...

