9-1
Chapter 9 Specifications
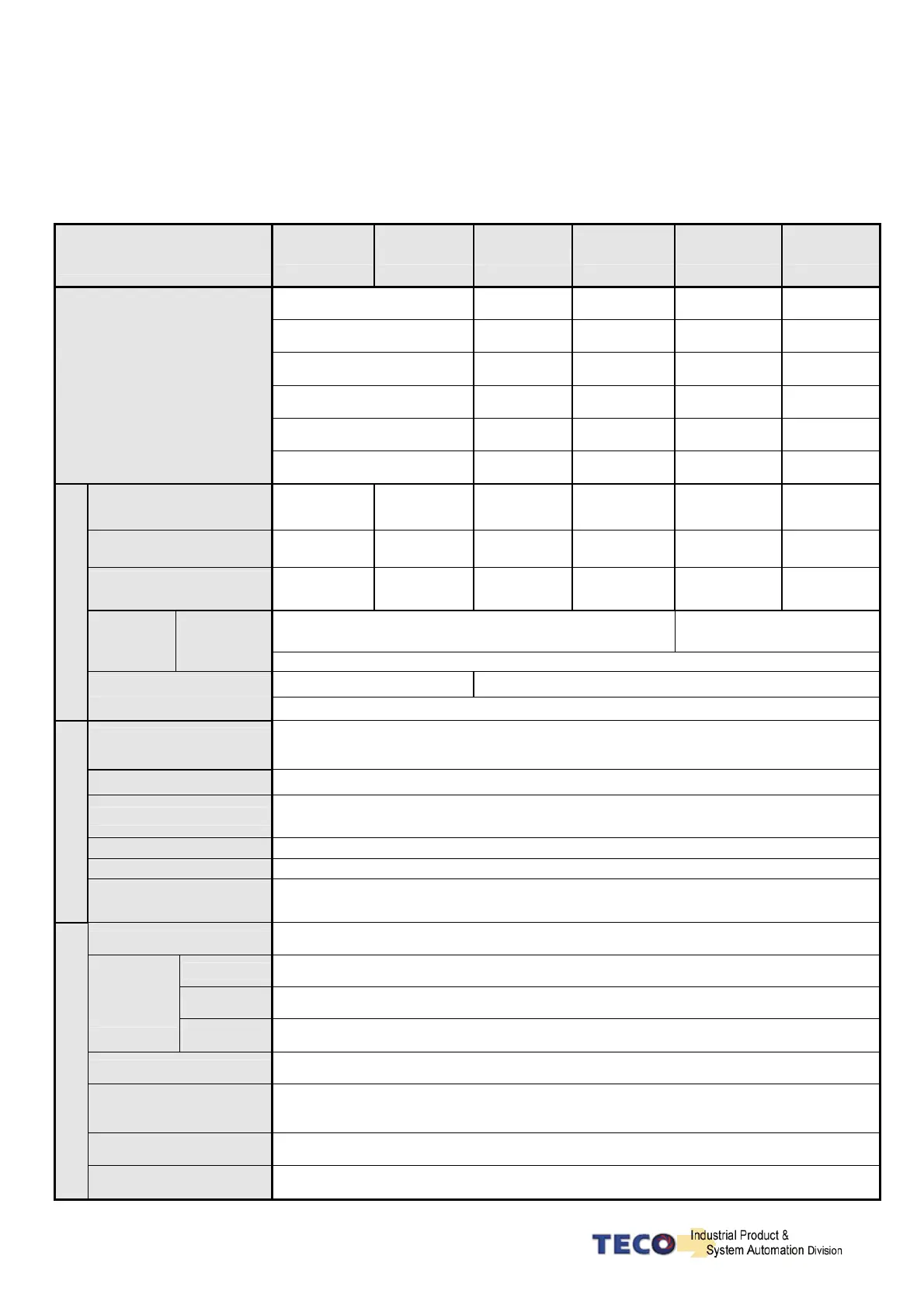
9-1 Specifications and Dimension for Servo Drives
Servo motor for
JSDEP-□□□
10A 15A 20A 30A 50A3 75A3
SC01 SC04 SC08 MA15 MB30
SC04*
1
SC08*
1
MA10 MB15 MC30
LC03 LC08 MB10 MC15 MH30
─ MA05 MC10 MB20 ─
─ MH05 MH10 MC20 ─
Available Servo Motor
(Applicable Motor Models)
JSMA-□□□□
─ ─ ─ ─ ─
Servo motor capacity
[KW] Max.
0.1 0.4 0.75 1.0 2.0 3.0
Continuous output
current [A rms]
0.94 2.5 4.4 5.16 9.5 15.0
Max. output current
[A rms]
2.82 7.5 13.2 15.5 28.5 42.0
Single / Three Phase AC 170 ~ 253V
Three Phase
AC 170 ~ 253V
Input
Power
Supply
Main Circuit
R/S/T
50 / 60Hz ±5%
Cooling System Natural Air Cooling Fan Cooling
Basic Specifications
Control of Main Circuit Three-phase full-wave rectification IGBT- PWM Control
Resolution of
Encoder Feedback
Incremental type: 2500ppr / 8192ppr
Panel and operation key 5 digital seven-segment display ; four function key
Control Mode
Position(Pulse input), Position (Internal control), Speed, Torque, and Dual mode
switching (Position/Speed, Speed/Torque, Position/Torque)
Regeneration Brake Built-in braking transistor and resistor / External braking resistor
Prottection Function 15 types of alarm functions
Internal Functions
Communication
interface
RS-232 / RS-485 (Modbus protocol)
Command Source External Pulse Command / 32 groups of internal register Command
Type
Positive/Negative Edge Trigger Type : CW/CCW, CLK+DIR, A Phase + B Phase
Waveform
Line Driver (+5V), Open Collector (+5 ~ +24V)
External
Command
Pulse Input
Max.
Frequency
4Mpps(Line Driver) / 200Kpps(Open Collector)
Electronice Gear
1/200 ≦ A/B ≦ 200 (A=1 ~ 50000;B=1 ~ 50000)
Position Smoothing
Constant
(Input Ripple Filtering)
Ripple Time Constant 0~10sec
Final Position Tolerance
(In Position)
0 ~ 50000 Pulse
Position Control Mode
Feed Forward
Compensation
0 ~ 100 %

 Loading...
Loading...
