5-6
5-2-4 Definition of torque direction
In torque mode, torque direction can be defined by one of the following three methods.
(1) Input contacts RS1, RS2. (torque command CW/CCW selectable by programmable input)
(2) Parameter Cn004. (motor rotation direction )
(3) Input contact TRQINV. (reverse torque command)
Caution !
All 3 methods can be active at the same time.
User must ensure that correct selections are made for these three selections.
Input Contact
RS2 RS1
Description
Control
mode
0 0 Zero torque
0 1
Rotation in the current torque command
direction
1 0
Reverse the current torque command direction
1 1 Zero torque
T
Note: RS2 and RS1 contact status “1” (ON) and “0” (OFF).
Please check 5-6-1 to set the required high /Low signal levels ( PNP/NPN) .
Parameter
Signal
Name
Setting
Description
Control
mode
No. Torque Control Speed Control
0
Counter Clockwise(CCW) Counter Clockwise (CCW)
1
Clockwise(CW) Counter Clockwise (CCW)
2
Counter Clockwise (CCW) Clockwise (CW)
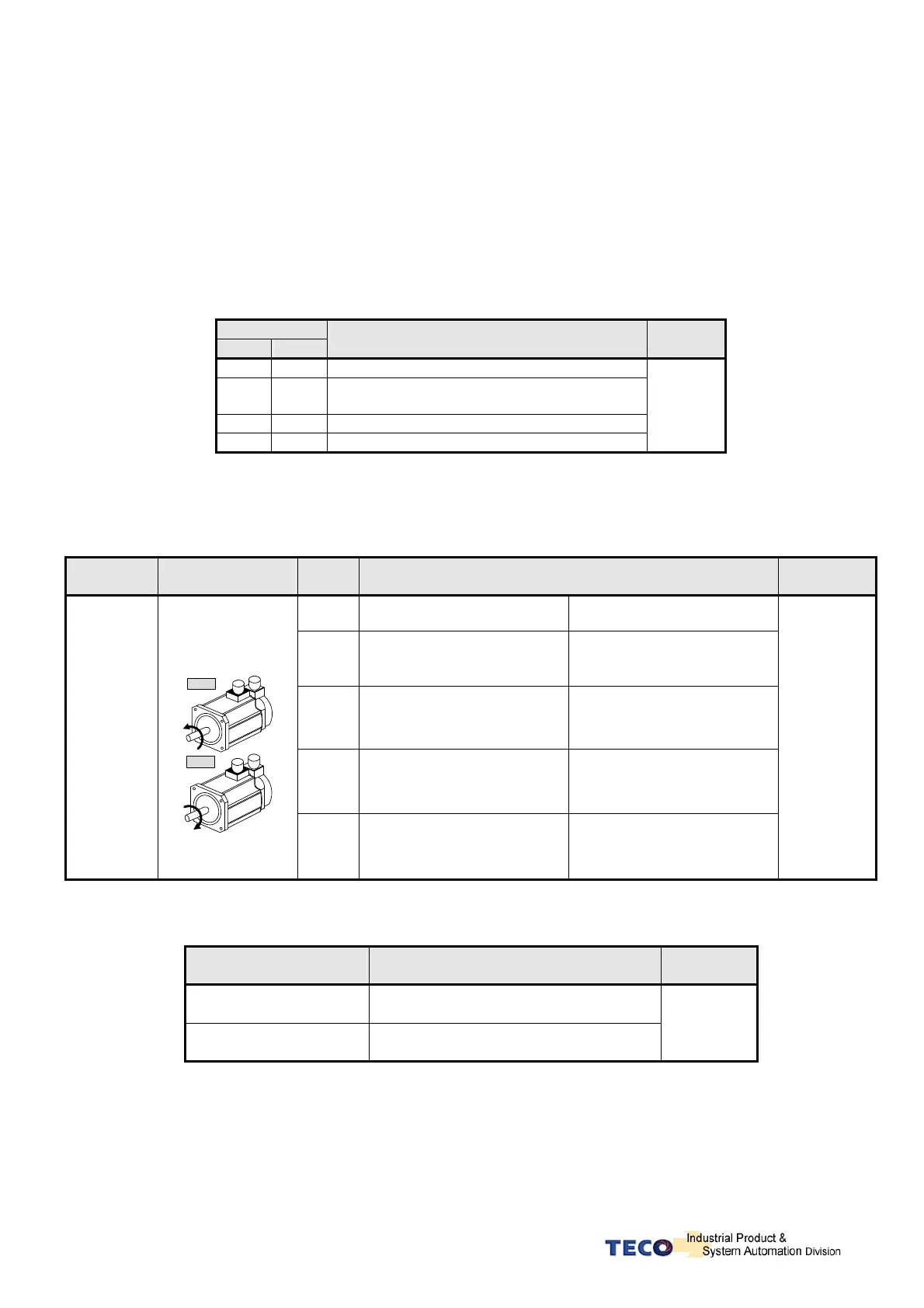
Cn004
Motor rotation
direction (load end)
CCW
CW
3
Clockwise (CW) Clockwise (CW)
S/T
Input contact TRQINV Description
Control
mode
0
Rotation in current torque command
direction
1
Reverse torque command direction
T
Note: Input contacts status “1” (ON) and “0” (OFF).
Please refer to 5-6-1 to set the required high /Low signal levels (PNP/NPN) selection.

 Loading...
Loading...
