ZED-F9R-Integration manual
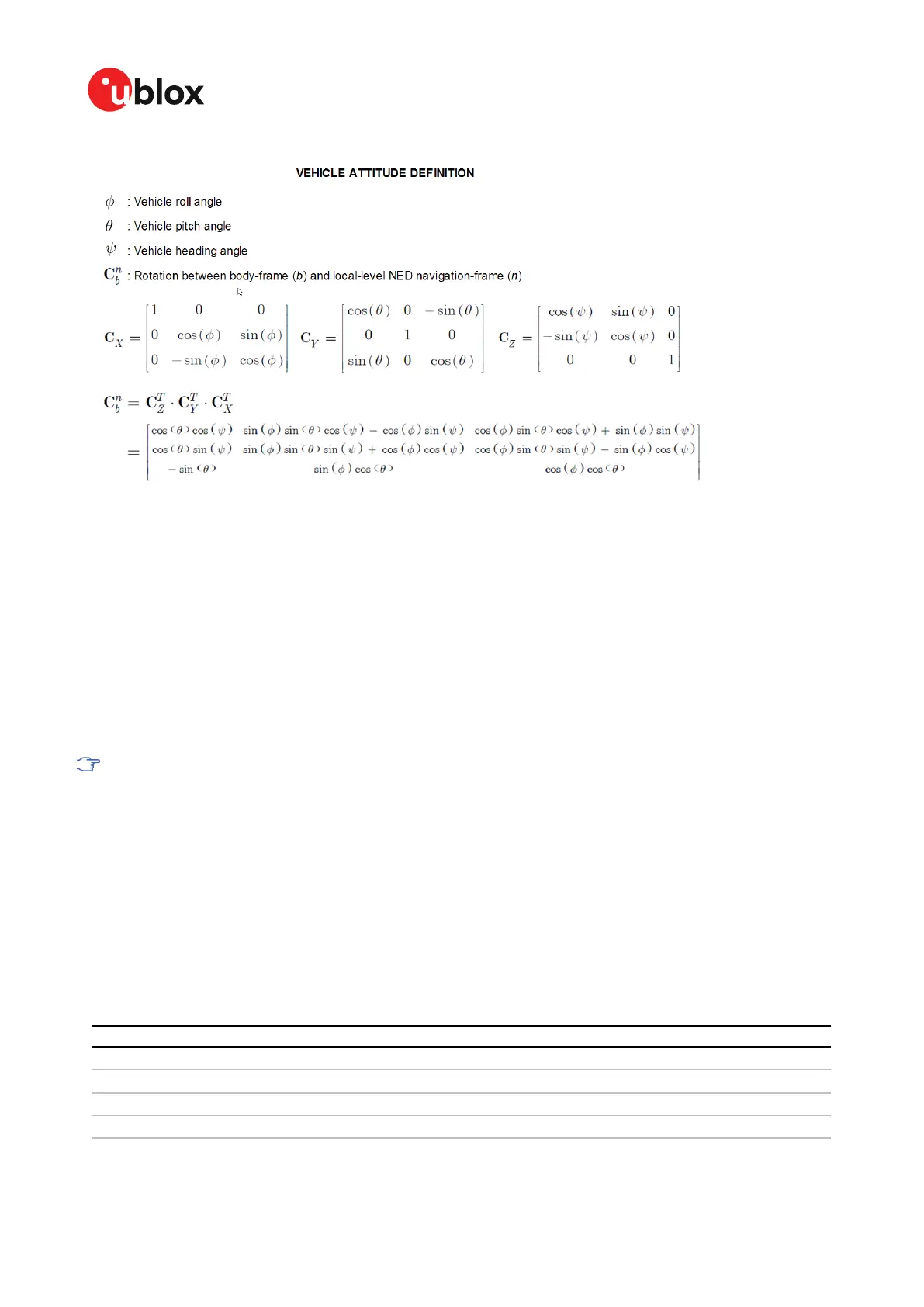
Figure 7: Vehicle attitude definition
Note that in this figure the body frame corresponds to the vehicle frame.
The vehicle attitude is output in the UBX-NAV-ATT message. The message provides all three angles
together with their accuracy estimates.
3.2.7.4.5 Vehicle dynamics output
The UBX-ESF-INS message outputs information about vehicle dynamics provided by the INS,
compensated vehicle angular rates, and compensated vehicle acceleration. The acceleration data
is free of any gravitational acceleration. Its accuracy is directly dependent on the filter attitude
estimation accuracy.
Compensated vehicle dynamics information is output with respect to the vehicle frame.
The message outputs only dynamics information that is directly compensated by the fusion
filter. This implies that depending on the solution type and the sensor availability, dynamics
along some axes of the vehicle frame might not be available.
3.2.7.5 Sensor data types
The UBX-ESF-MEAS messages can be used as input and/or output messages. They can provide the
following functionality:
• Output the ZED-F9R internal IMU measurements;
• Input external wheel tick or speed measurements from a host to ZED-F9R.
A different number of data fields may be used, and these can contain different types of
measurements. The type of each measurement is specified in the UBX-ESF-MEAS.dataType field.
The supported sensor data types are:
Type Description Unit Format of the 24 data bits
0 none, data field contains no data
1...4 reserved
5 z-axis gyroscope angular rate deg/s *2^-12 signed
6...7 reserved
UBX-20039643 - R06
3 Receiver functionality Page 38 of 119
C1-Public
 Loading...
Loading...