ZED-F9R-Integration manual
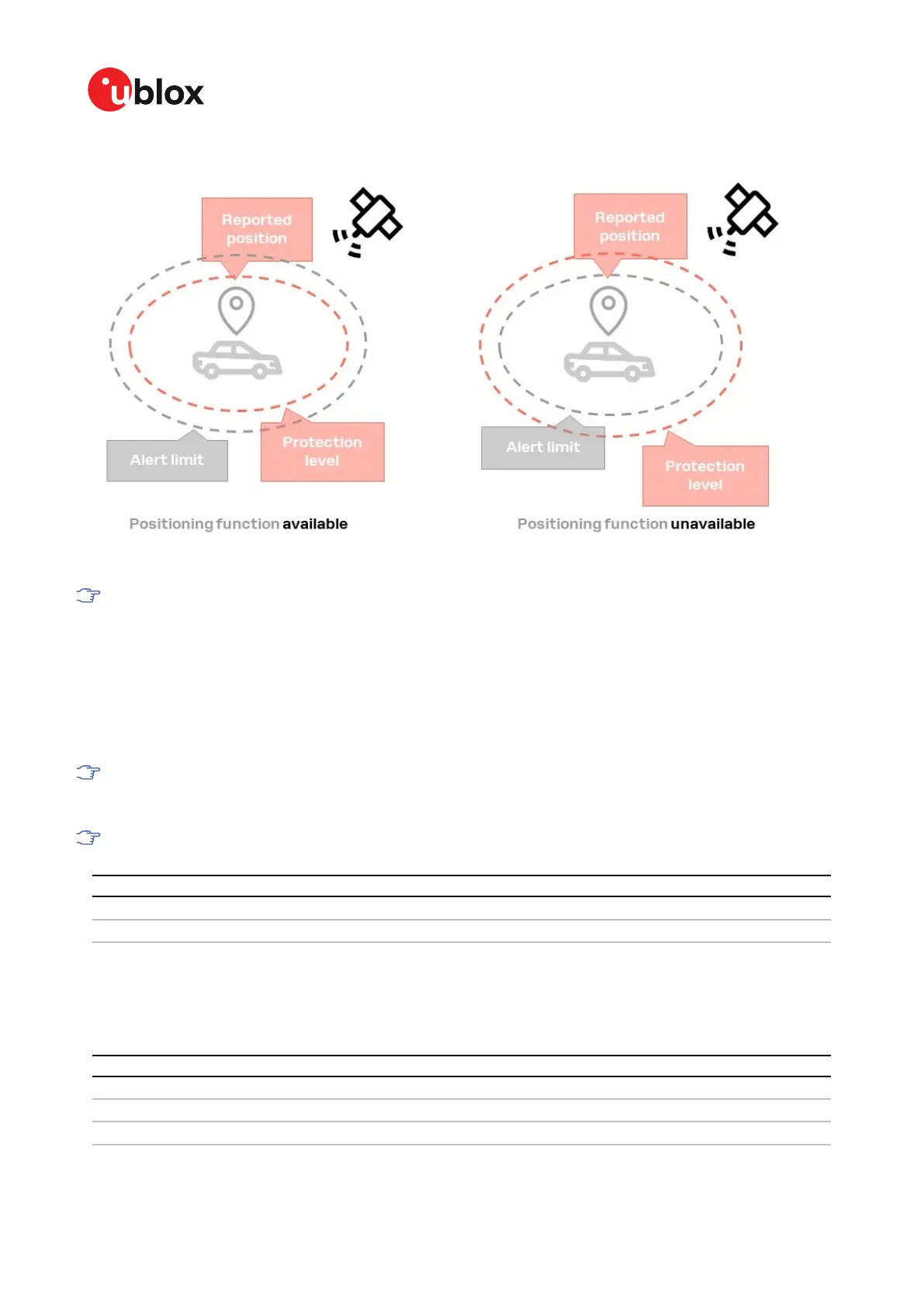
Figure 12: Positioning function
True position error is generally unknown, unless a very accurate and reliable truth
positioning system is reporting an estimate for the true position
When the GNSS environment deviates significantly from the normal mode of operation as compared
to scenarios where the PL has been validated, a validity flag is set to false to indicate these
conditions. These conditions tend to be binary in nature, such as jamming has been detected, or the
minimum number of satellites is being observed. UBX-NAV-PL reports a PL validity flag (see UBX-
NAV-PL.plPosValid), which indicates whether the PL is usable. This mechanism is not depicted in
Figure 12.
The protection level performance depends on many external and internal factors. Some
external factors such as the harsh GNSS environment, correction data, etc. may lead to
degraded PL performance.
The protection level validity is not to be confused with misleading information and is
independent of misleading information.
PL validity values Description
UBX-NAV-PL.plPosValid = 1 PL values are valid and can be used
UBX-NAV-PL.plPosValid = 0 PL values are invalid and shall not be used
Table 19: Position PL validity
3.5.3 Expected behavior
For each navigation epoch and for each coordinate axis, a PL value is provided. The coordinate frame
reported is horizontal-ellipse-vertical, then the UBX-NAV-PL contents can be interpreted as follows:
PL values Description
UBX-NAV-PL.plPos1 1 stands for the semi-major axis
UBX-NAV-PL.plPos2 2 stands for the semi-minor axis
UBX-NAV-PL.plPos3 3 stands for the vertical axis
UBX-20039643 - R06
3 Receiver functionality Page 48 of 119
C1-Public
 Loading...
Loading...