ZED-F9R-Integration manual
3.5 Protection level
Supported from firmware version HPS 1.30 onwards
3.5.1 Introduction
Critical applications need to know how much trust they can place in their GNSS receiver’s output at
any given moment. Computed by the GNSS receiver in real-time, the protection level (PL) quantifies
the reliability of the position information, to allow systems to change their mode of operation to
improve the efficiency and quality of the tasks being performed.
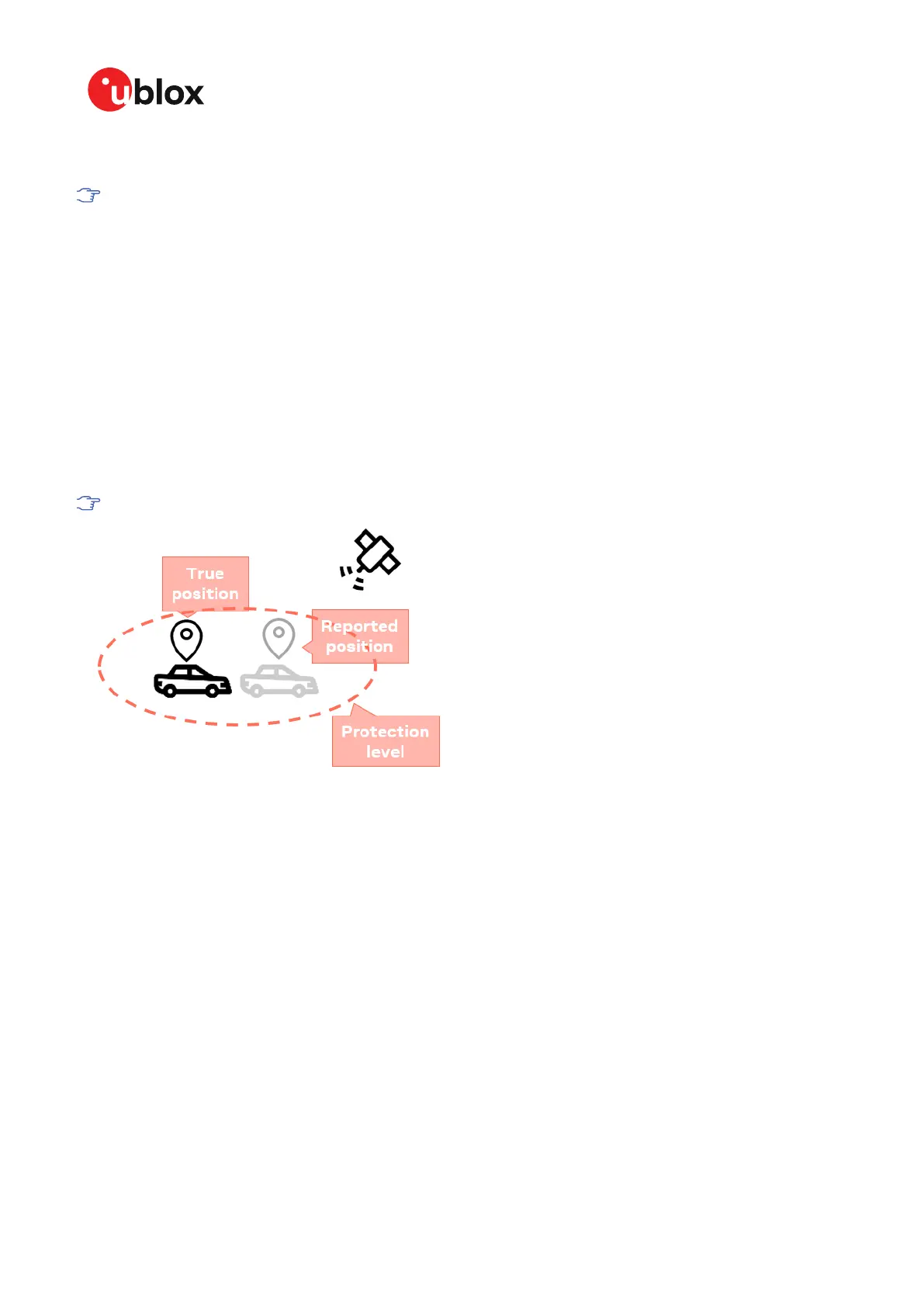
The GNSS receiver’s protection level describes the maximum likely position error to a specified
degree of confidence. For example, if a GNSS receiver determines its position with a 95% protection
level of one meter, there is only a 5% chance that the reported position is more than one meter
away from its true position. Like the accuracy estimate of the GNSS receiver, the protection level
constantly fluctuates, influenced by all the common error sources that affect GNSS solutions. Unlike
the accuracy estimate, the confidence level of the protection level is much higher and is validated
against specific operating scenarios to ensure that the output bounds the true error.
Currently the protection level is limited to automotive dynamic model only.
Figure 10: PL bounding true position error
3.5.2 Interface
The protection level bounds the true position error with a target misleading information risk (TMIR),
for example 5[%MI/epoch] (read: 5% probability of having an MI per epoch). The target misleading
information risk describes the probability per epoch of having misleading information (MI), that is,
the true position error is larger than the protection level and fails to bound the true position error
(see Figure 11).
UBX-20039643 - R06
3 Receiver functionality Page 46 of 119
C1-Public
 Loading...
Loading...