2. Dual Robot Calibration
2.8.1 Validation
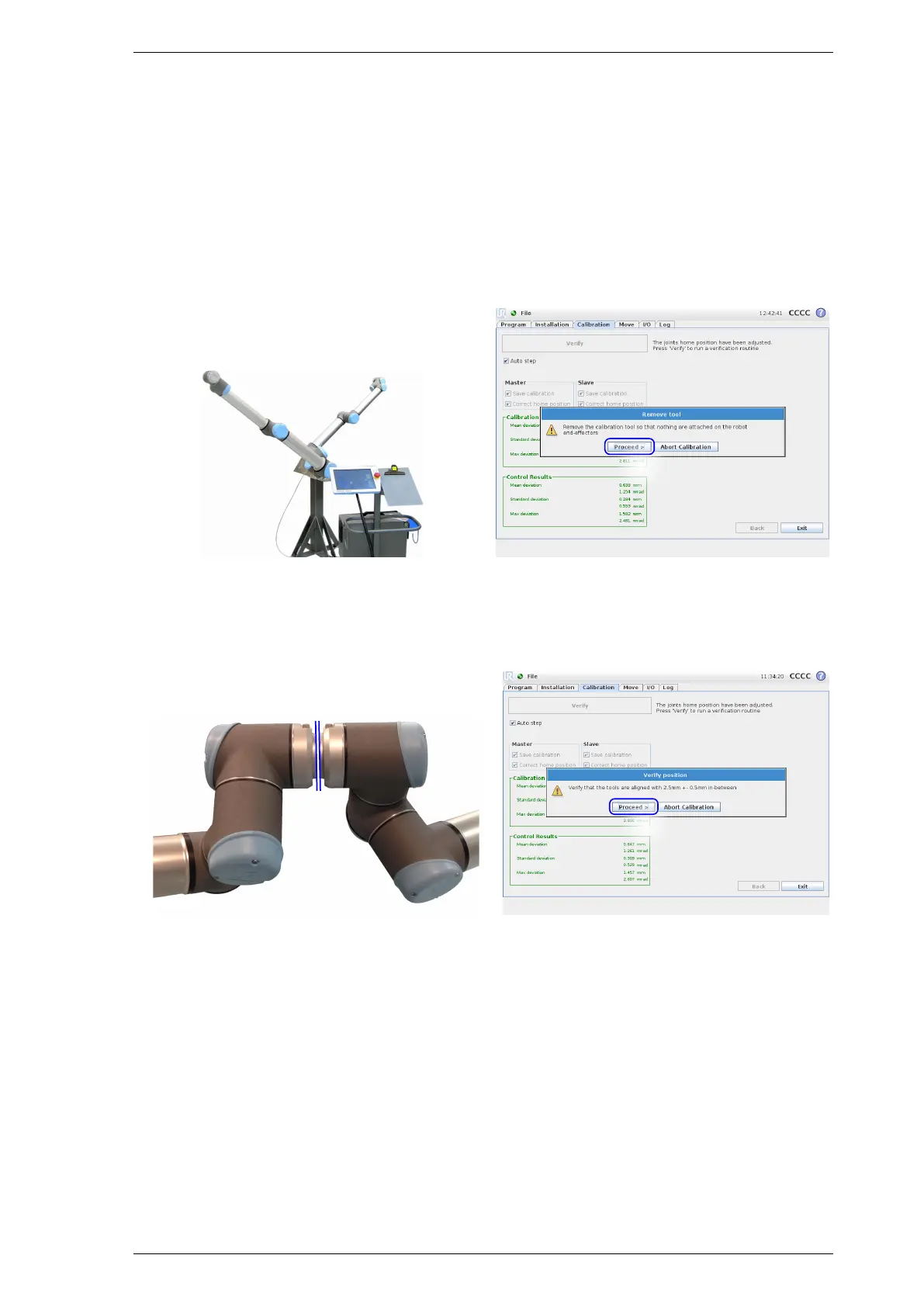
Next a validation procedure follows. Here both robot tool flanges need to complete free from e.g. screws, pins.
(17)
Remove the calibration tool and alignment pins etc. and Proceed with the validation, see Figure 2.30. The
robots TCP will now approach one another.
(18)
Verify that the distance in-between the robot tools is within a distance of 2.5 mm
±
0
.
5
mm
, see Figure
2.31.
(19) If the verification is successful in step no. 18, Proceed to the next validation step, see Figure 2.32.
Figure 2.29: Robots ready for the validation procee-
dure
17
Figure 2.30: Proceed to the Verification procedure
when the calibration tool, screws, and alignment pins
are removed from the robots tool flange
2.5mm ± 0.5mm
18
Figure 2.31: Verification by alignment of tools
19
Figure 2.32: Proceed if the verification in step no. 18
is successful
19

 Loading...
Loading...







