C. Robot Parameter
C Robot Parameter
C.1 UR5
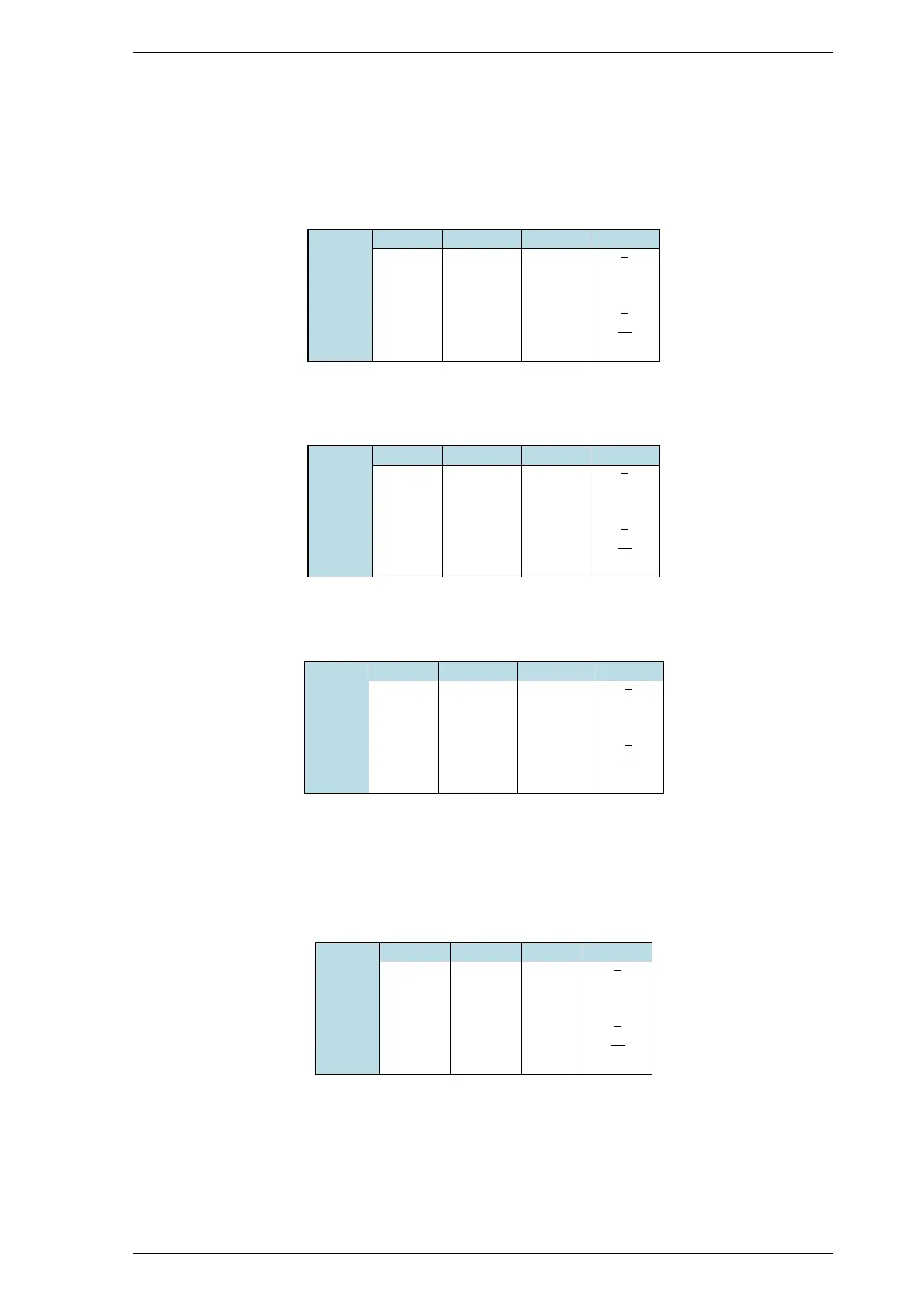
The robots kinematic transformations for each link are given by Denavite-Hartenberg parameters. The parame-
ters for UR5 is displayed in tabel C.1 to C.3.
θ [rad ] a [m ] d [m ] α [r a d ]
Joint 1: 0 0 0.08920
π
2
Joint 2: 0 −0.42500 0 0
Joint 3: 0 −0.39243 0 0
Joint 4: 0 0 0.10900
π
2
Joint 5: 0 0 0.09300
−π
2
Joint 6: 0 0 0.08200 0
Table C.1: Denavit-Hartenberg parameters for the UR5 serie 1.
θ [rad ] a [m ] d [m ] α [r a d ]
Joint 1: 0 0 0.08920
π
2
Joint 2: 0 −0.42500 0 0
Joint 3: 0 −0.39225 0 0
Joint 4: 0 0 0.11000
π
2
Joint 5: 0 0 0.09475
−π
2
Joint 6: 0 0 0.08250 0
Table C.2: Denavit-Hartenberg parameters for the UR5 serie 2.
θ [rad ] a [m ] d [m ] α [r a d ]
Joint 1: 0 0 0.089159
π
2
Joint 2: 0 −0.42500 0 0
Joint 3: 0 −0.39225 0 0
Joint 4: 0 0 0.10915
π
2
Joint 5: 0 0 0.09465
−π
2
Joint 6: 0 0 0.08230 0
Table C.3: Denavit-Hartenberg parameters for the UR5 serie 3.
C.2 UR10
θ [rad ] a [m ] d [m] α [rad ]
Joint 1: 0 0 0.118
π
2
Joint 2: 0 −0.6127 0 0
Joint 3: 0 −0.5716 0 0
Joint 4: 0 0 0.1639
π
2
Joint 5: 0 0 0.1157
−π
2
Joint 6: 0 0 0.0922 0
Table C.4: Denavit-Hartenberg parameters for the UR10 robot serie 1.
23

 Loading...
Loading...







