2. Dual Robot Calibration
Secondly the robots will move to their new calibrated home position. Here it is important that the robots are
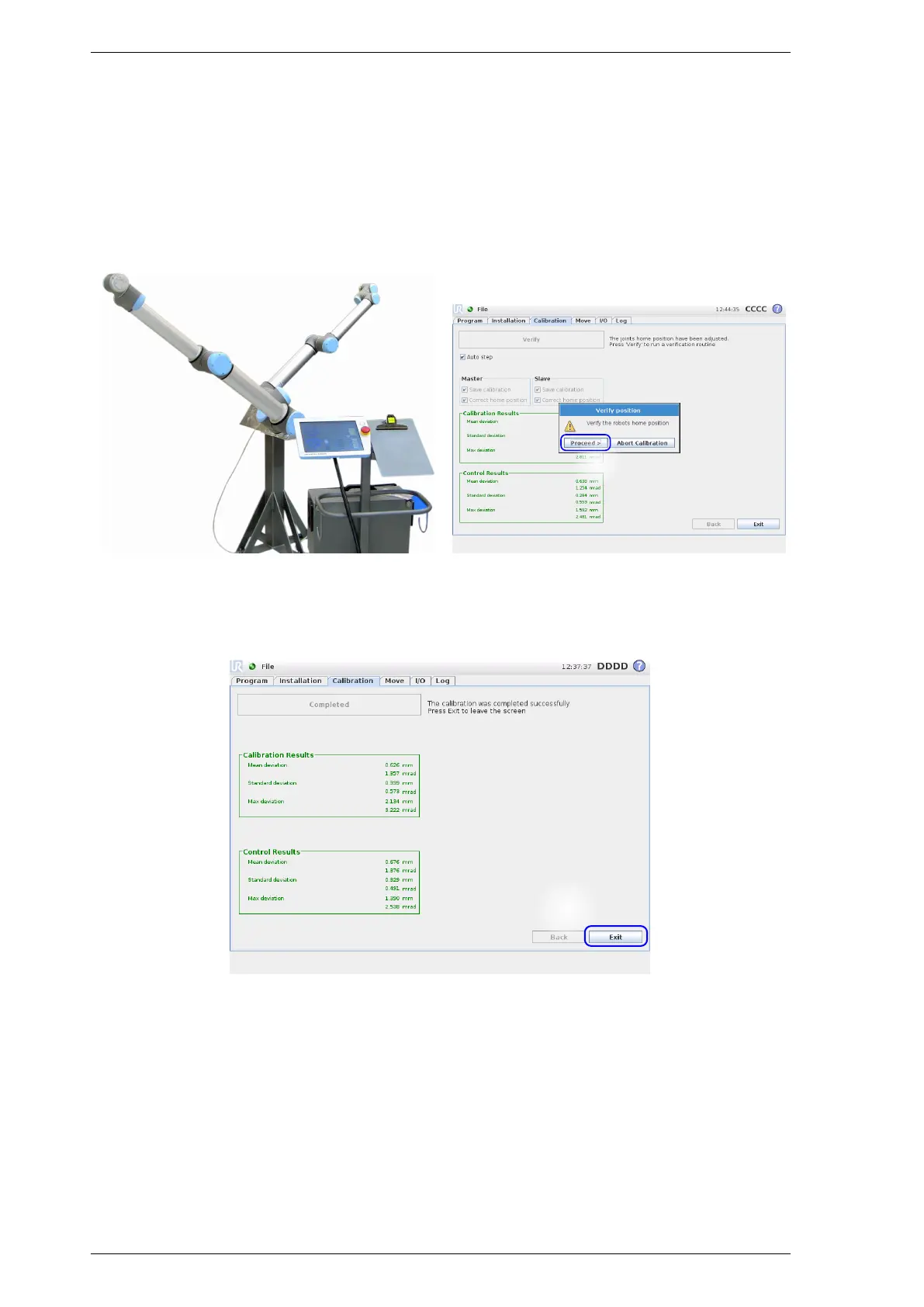
fully stretch out and that the tools are pointing in the right direction, like in Figure 2.33. After completion of step
no. 21 the Dual Robot Calibration procedure has been completed, see Figure 2.35
(20) Verity the robot home positions, see 2.33.
(21) If the verification is successful in step no. 20, Proceed to the next validation step, see Figure 2.34.
(22) Calibration done, press Exit, see Figure 2.35.
20
Figure 2.33: Verify the robots new home position
21
Figure 2.34: Proceed if the verification in step no. 20
succeed
22
Figure 2.35: Kinematic Calibration is done
2.8.2 Reset Calibration
The calibration can manually be adjusted or reset by editing the /root/.urcontrol/calibration.conf file placed
together with the other configurations. To reset the calibration all decimal and hex numbers is reset to zero like
in Listing 1.2 in page 8.
20