8
Voltage
Description
01 02
200 VAC
04 08
Applicable SERVOPACK
Rated Output
*
1
Rated Torque
*
1,
*
2
Instantaneous Peak Torque
*
1
Rated Current
*
1
Instantaneous Max. Current
*
1
Rated Speed
*
1
Max. Speed
*
1
Torque Constant
Rotor Moment of Inertia
Rated Power Rate
*
1
Rated Angular
Acceleration
*
1
Time Rating
Thermal Class
Vibration Class
Withstand Voltage
Insulation Resistance
Enclosure
Impact Resistance
Vibration Resistance
01
100
0.318
0.955
0.84
2.5
02
200
0.637
1.91
1.1
3.3
3000
4500
04
400
1.27
3.82
2.0
6.0
08
750
2.39
7.16
3.7
11.1
0.413
0.0634
16.0
50200
Continuous
B
15µm or below
1500 VAC for one minute
500 VDC, 10 MΩ min.
0.645
0.330
12.3
19300
0.682
0.603
26.7
21100
0.699
1.50
38.1
15900
Description
*
:
To obtain the motor moment of inertia with a brake, add the holding brake moment of inertia to the rotor moment of inertia. The rated power
rate and angular acceleration of the motor will change according to the motor moment of inertia.
Notes: 1 The holding brake is only used to hold the load and cannot be used to stop the servomotor.
2 Do not use the holding brake when the servo is on. Failure to observe this caution may result in an overload in the SERVOPACK or a
decrease in the brake life.
01 02
24 VDC
±10%
04 08
Rated Voltage
Holding Brake Moment of Inertia
*
Capacity
Min. Holding Torque (Static Friction Torque)
Coil Resistance
Rated Current
Brake Release Time
Rise Time for Holding Torque
kg
m
2
×
10
-4
W
N
m
Ω(at 20˚C)
A(at 20˚C)
ms
ms
0.0075
6
0.318
96
0.25
0.064
6.9
1.27
83
0.29
80 max.
100 max.
0.171
7.7
2.39
75
0.32
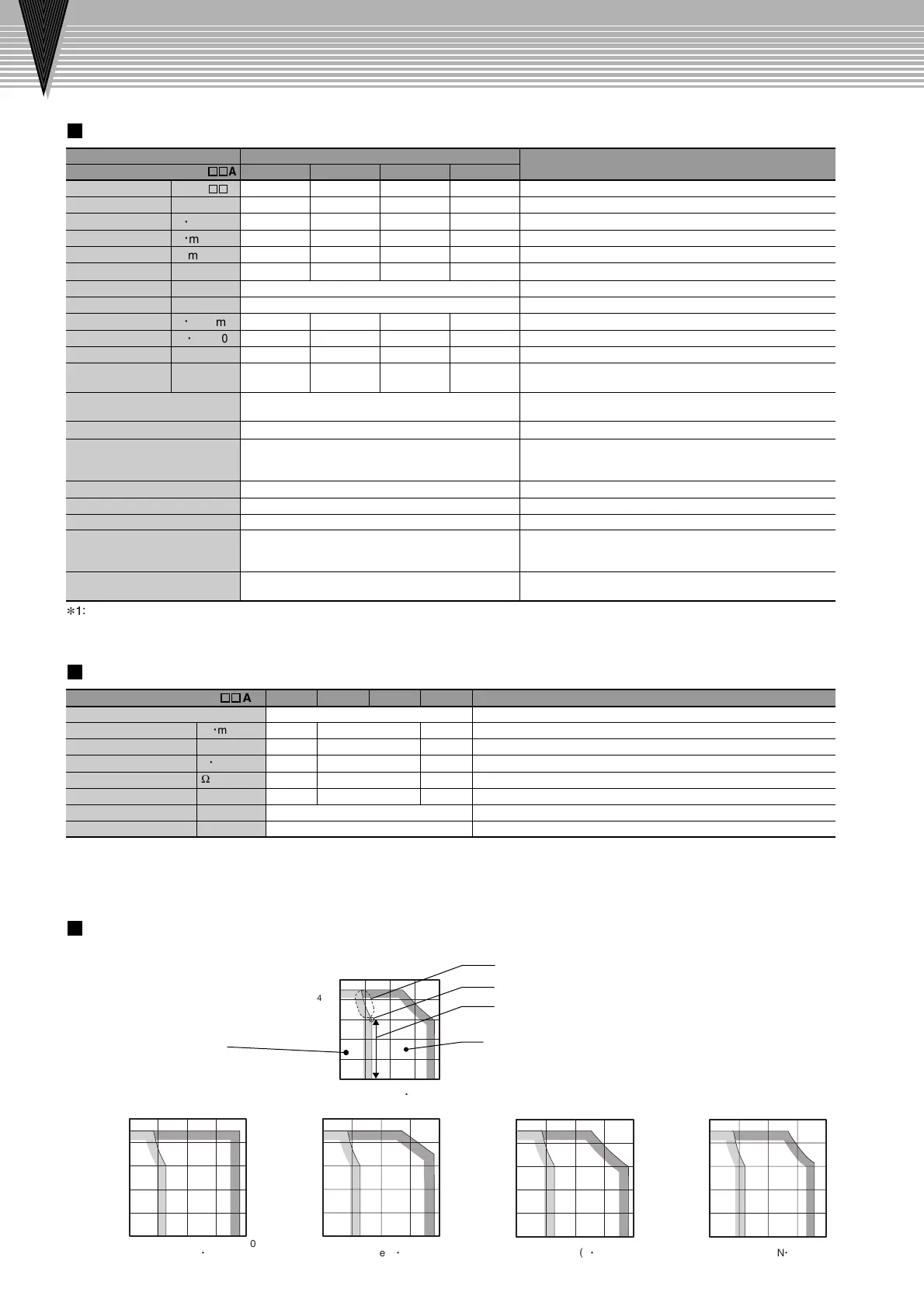
How to Read a Gragh of Speed and Torque Characteristics
Speed (min
-1
)
Speed (min
-1
)
Speed (min
-1
)
Speed (min
-1
)
Speed (min
-1
)
Servomotors
Servomotors
Impact acceleration: 490 m/s
2
in three directions
—
vertical,
side to side, and front to back.
Impact occurrences: 2
Vibration acceleration: 49 m/s
2
in three directions
—
vertical, side to side, and front to back.
Totally enclosed, self-cooled, IP55 (excluding shaft opening and connectors)
–
Motor output at the rated operating point
Torque at the rated operating point
Maximum instantaneous torque of the motor
Current flowing to the motor at the rated operating point
Maximum instantaneous current that is allowed to flow to the motor
Speed at the rated operating point
Highest possible speed
Generated torque ratio for current flowing to the motor
Inertia moment at the rotor shaft
Motor output per unit time
The theoretical angular acceleration(also called torque-to-
inertia ratio) at the rated torque
"Continuous rating" means that the temperature of the servomotor in continuous operation
under specified conditions will not exceed a specified temperature or other limitation.
Highest allowable temperature for armature winding: 130˚C
The maximum vibration amplitude of the motor expressed in units of
micrometers on the condition that the vibration is measured with a vibrometer
parallel to the shaft and in two directions perpendicular to the shaft.
–
–
Level of protection from dust and water drops
Impact resistance of the motor in three directions (up and
down, left and right, and back and forth) with the motor
shaft mounted horizontally
Vibration resistance of the motor in three directions (up and down, left
and right, and back and forth) with the motor shaft mounted horizontally
–
–
–
Torque against an external force to hold the shaft
Resistance of the built-in coil in the brake
Current that flows when the brake is released
Time from when the power for the holding brake is turned on until the brake is released.
Time from when the power for the holding brake is turned off until the brake reaches the set torque.
Ratings and Specifications
Holding Brake Specifications
Speed / Torque Characteristics
Servomotor Model: SJME- A
SJDE- A
W
N
m
N
m
Arms
Arms
min
-1
min
-1
N
m/Arms
kg
m
2
×
10
-4
kw/s
rad/s
2
Servomotor Model:SJME- A
*
1
:
These items and speed/ torque characteristics quoted in combination with an SJDE SERVOPACK are at an
armature winding temperature of 100˚C. Other values quoted at 20˚C.
*
2
:
The rated torques listed here are the values for the continuous allowable torque at 40˚C with an aluminum heatsink
(250 mm
×
250 mm
×
6 mm) attached.
A
B
SJME-04A
Torque
(
N
m
)
3000
4000
2000
1000
5000
0
01234
The output torque will decrease if the speed exceeds the rated speed.
Rated torque
The same torque is output at any rotation speed.
B. Repetitive operating range
Range where the motor can be operated for a short time,
provided that the effective torque of the motor is within
the continuous operating range.
A. Continuous operating range
Safe range allowing the continuous operation
of the servomotor.
The effective torque must be within this range.
Rated operating point
SJME-01A SJME-02A SJME-04A SJME-08A
Torque
(
N
m
)
Torque
(
N
m
)
Torque
(
N
m
)
Torque
(
N
m
)
0 0.25 1.000.750.50
0
3000
4000
2000
1000
5000
AB
AB
3000
4000
2000
1000
5000
0
0 0.5 2.01.51.0
AB
3000
4000
2000
1000
5000
0
01234
3000
4000
2000
1000
5000
0
AB
02 468
Note: Solid lines show the torque/speed characteristics of the servomotor at 200 VAC, and the broken lines show them at 230 VAC.

 Loading...
Loading...







