1 Description
1.3.3 Mounting the manipulator
3HAC 9112-1 Rev.N 19
1.3.3 Mounting the manipulator
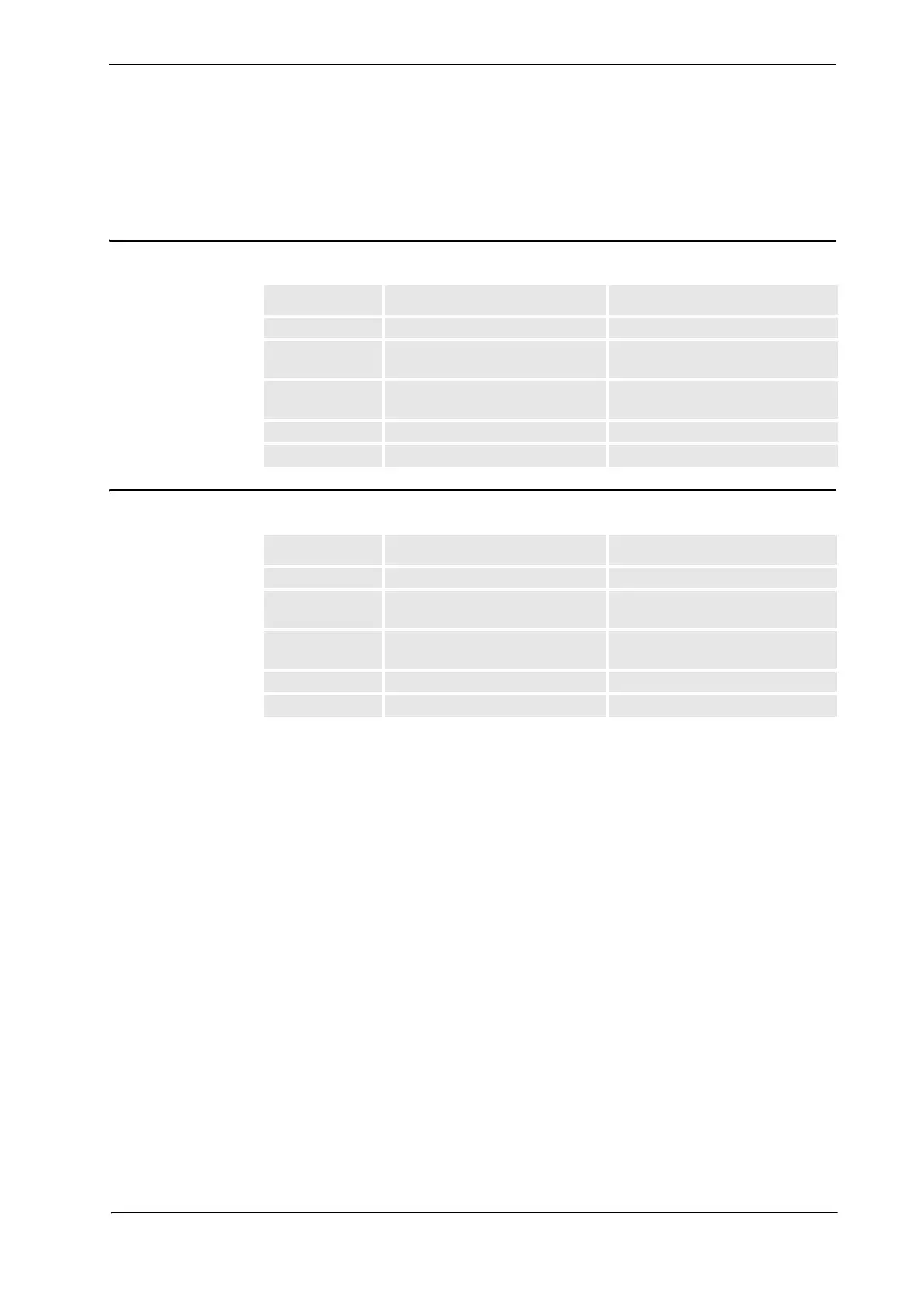
Maximum load in relation to the base coordinate system. See Figure 6.
IRB 2400/L
IRB 2400/10 and IRB 2400/16
Endurance load in operation Max. load at emergency stop
Force xy ± 1700 N ± 2100 N
Force z floor
mounting
+ 4100 ±1100 N + 4100 ± 1400 N
Force z inverted
mounting
- 4100 ±1100 N - 4100 ± 1400 N
Torque xy ± 3000 Nm ± 3400 Nm
Torque z ±450 Nm ± 900 Nm
Endurance load in operation Max. load at emergency stop
Force xy ± 2000 N ± 2600 N
Force z floor
mounting
+ 4100 ± 1400 N + 4100 ± 1900 N
Force z inverted
mounting
- 4100 ± 1400 N - 4100 ± 1900 N
Torque xy ± 3400 Nm ± 4000 Nm
Torque z ±550 Nm ± 900 Nm

 Loading...
Loading...








