Rockwell Automation Publication 520-UM001G-EN-E - September 2014 129
Programming and Parameters Chapter 3
Advanced Program Group (continued)
A572 [Speed Ratio]
Stop drive before changing this parameter.
Scales the drive speed command.
Values Default: 1.00
Min/Max: 0.01/99.99
Display: 0.01
A573 [Mtr Options Cfg]
PowerFlex 525 only.
(With FRN 2.xx and later.)
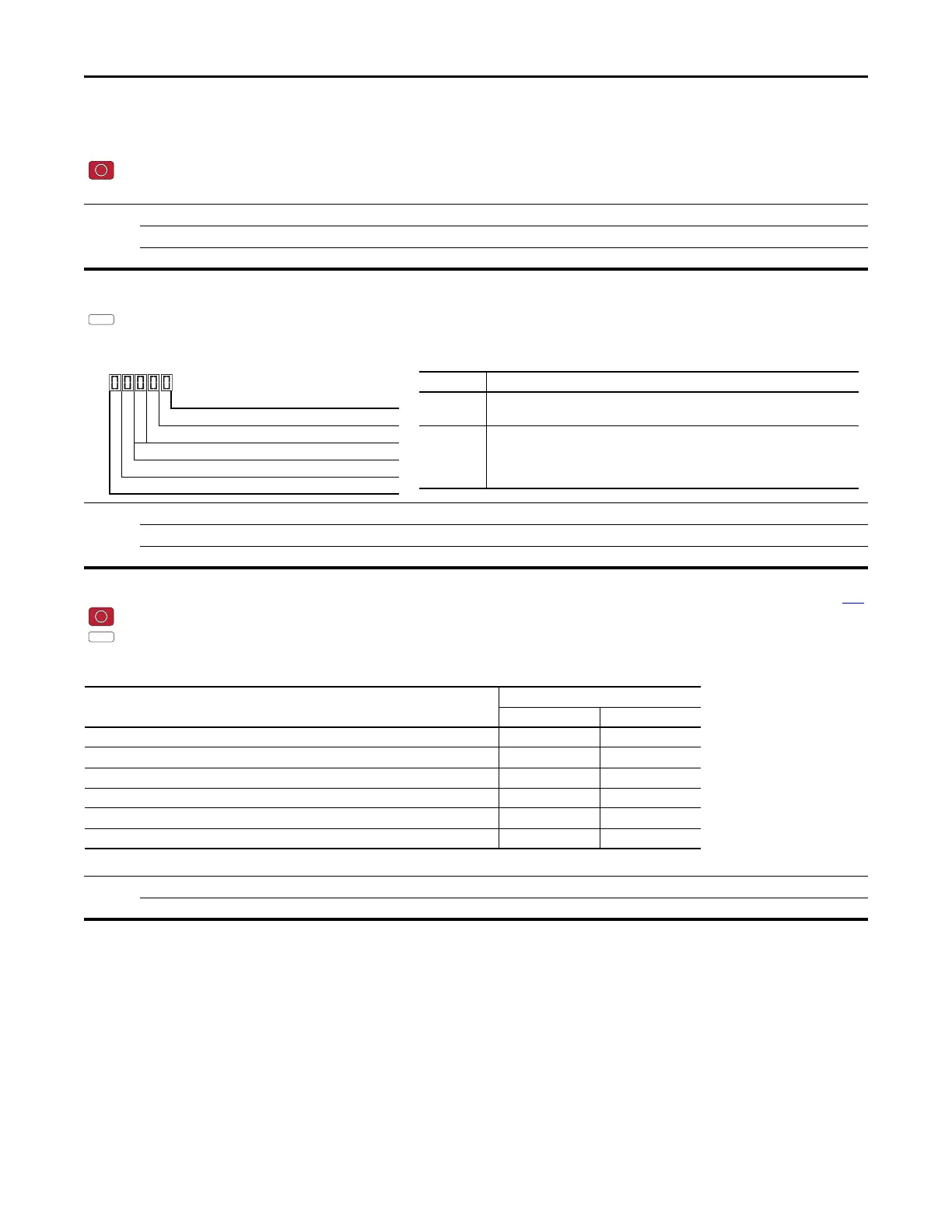
Sets the configuration of the motor option.
Values Default: 11
Min/Max: 00/11
Display: 00
1 = Enabled, 0 = Disabled
Jerk Select Digit 1
ZeroSpd Slip Digit 2
Not Used
Not Used
Not Used
Options Description
Jerk Select Limits the rate of change to the velocity reference for improved current limiting. Set to
0 “Disabled” for positioning type applications with fast Accel or Decel times.
ZeroSpd Slip Sets slip compensation to 0.0 Hz when the following conditions are met:
• Commanded speed = 0.00 Hz
• Status of drive = “At speed”
• ZeroSpd Slip = 1 “Enabled”
A574 [RdyBit Mode Cfg] Related Parameter(s): d392
Stop drive before changing this parameter.
PowerFlex 525 only.
(With FRN 3.xxx and later.)
Determines which Stop conditions causes the drive’s Ready bit (Network Logic Status bit 1) to go low (0). A reset or power cycle is required after selection is made.
Options 0“Standard” (Default)
1“Enhanced”
Ready Bit Status
(1)
(1) 1 = Active, 0 = Inactive
Stop Conditions Standard Enhanced
Drive fault 0 0
Stop digital input terminal 01/11 open 1 0
Holding down the drive’s keypad or the Remote DSI HIM Stop button 1 0
Stop commanded through Comms (Stop bit = 1) 1 0
Software (SW) Enable digital input terminal open 1 0
Safe-Torque-Off (STO) condition with value of t105 [Safety Open En] set to 1 “FaultDisabled” 0 0

 Loading...
Loading...