218 Rockwell Automation Publication 520-UM001G-EN-E - September 2014
Appendix F PID Set Up
A460 and A472 [PID x Fdback Sel] are used to select the source of the PID
feedback.
Analog PID Reference Signals
Parameters t091 [Anlg In 0-10V Lo] and t092 [Anlg In 0-10V Hi] are used to
scale or invert an analog PID Reference or PID Feedback.
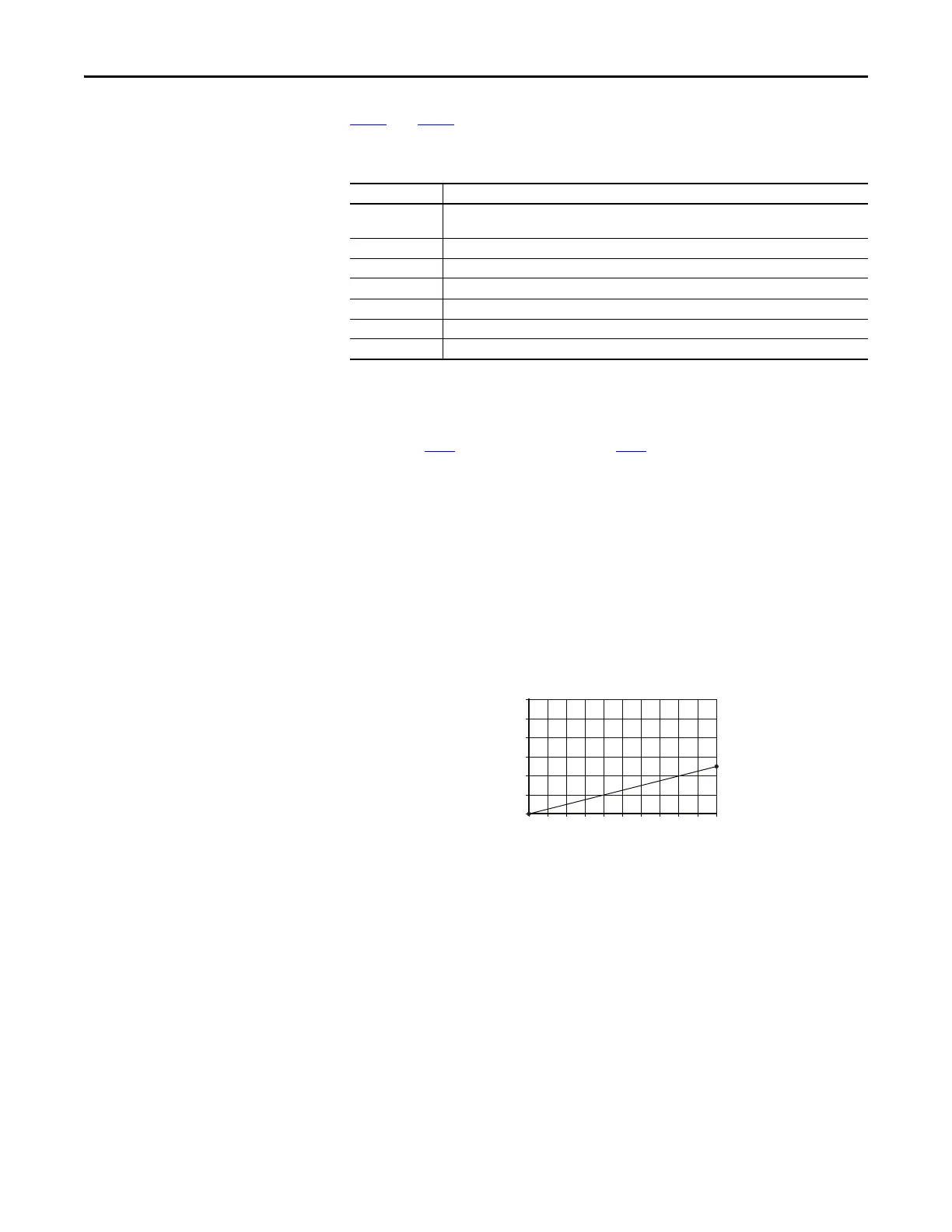
Scale Function
For a 0...5V signal, the following parameter settings are used so that a 0V signal =
0% PID Reference and a 5V signal = 100% PID Reference.
• t091 [Anlg In 0-10V Lo] = 0.0%
• t092 [Anlg In 0-10V Hi] = 50.0%
• A459 [PID 1 Ref Sel] = 5 “0-10V Input”
Invert Function
For a 4-20 mA signal, the following parameter settings are used so that a 20 mA
signal = 0% PID Reference and a 4 mA signal = 100% PID Reference.
• t092 [Anlg In4-20mA Lo] = 100.0%
• t096 [Anlg In4-20mA Hi] = 0.0%
A460, A472 [PID x Fdback Sel] Options
Options Description
0 “0-10V Input” Selects the 0-10V Input (default setting). Note that the PID will not function with a bipolar analog
input. It will ignore any negative voltages and treat them like a zero.
1 “4-20mA Input“ Selects the 4-20 mA Input.
2 “Serial/DSI” Serial/DSI will be used as an input for the PID Feedback.
3 “Network Opt” The reference word from a communication network option becomes the PID Reference.
4 “Pulse Input” Pulse train will be used as an input for the PID Feedback.
5“Encoder”
(1)
(1) Setting is specific to PowerFlex 525 drives only.
Encoder will be used as an input for the PID Feedback.
6“Ethernet/IP”
(1)
Ethernet/IP will be used as an input for the PID Feedback.
0 10 20 30 40 50 60 70 80 90 100
PID Reference (%)
Input Volts
2
4
6
8
10
12

 Loading...
Loading...