MCD 200 Design Guide
MG.17.C3.02 – VLT is a registered Danfoss trademark 21
Soft Start Application Guide
■ Soft Start Application Guide
■ Application Guide
This section provides data useful in the selection and
application of soft starters.
■
Reduced Voltage Starting
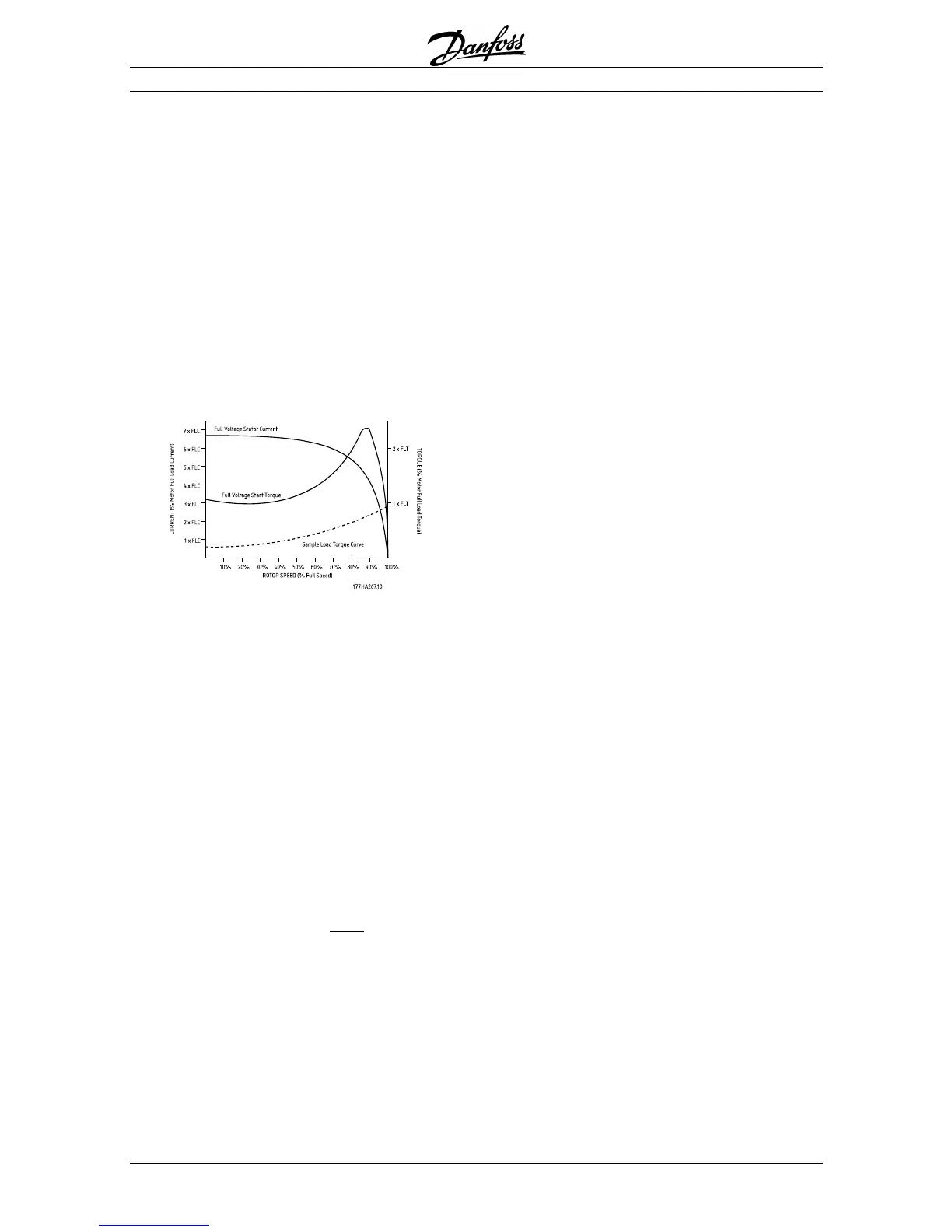
When started under full voltage conditions AC
induction motors initially draw locked rotor current
(LRC) and produce locked rotor torque (LRT). As the
motor accelerates the current falls and the torque
increases to breakdown torque before falling to full
speed levels. Both the magnitude and shape of the
current and torque curves are dependent on motor
design.
Motors with almost identical full speed characteristics
often vary significantly in their starting capabilities.
Locked rotor currents range from as low as 500%, to
in excess of 900% of motor FLC. Locked rotor torques
range from as low as 70%, to highs of around 230%
motor full load torque (FLT).
The motor's full voltage current and torque
characteristics set the limits for what can be achieved
with a reduced voltage starter. For installations in
which either minimising start current or maximising
start torque is critical, it is important to ensure that a
motor with low LRC and high LRT characteristics is
used.
When a reduced voltage starter is used, motor start
torque is reduced according to the following formula.
ST
=
LRT x
I
ST
LRC
(
)
2
T
ST
= Start torque
I
ST
= Start current
LRC = Motor Locked Rotor Current
LRT = Motor Locked Rotor Torque
Start current can be reduced only to the point where
the resulting start torque still exceeds the torque
required by the load. Below this point motor
acceleration will cease and the motor/load will not
reach full speed.
The most common reduced voltage starters are:
• Star/Delta starters
• Auto-transformer starters
• Primary resistance starters
• Soft starters
Star/Delta starting is the cheapest form of reduced
voltage starting, however performance is limited. The
two most significant limitations are:
1. There is no control over the level of current and
torque reduction; these are fixed at one third of
the full voltage levels.
2. There are normally large current and torque
transients as the starter changes from star to
delta. This causes mechanical and electrical
stress often resulting in damage. The transients
occur because as the motor is spinning and then
disconnected from the supply it acts as a
generator with output voltage which may be at the
same amplitude as the supply. This voltage is still
present when the motor is reconnected in delta
configuration, and can be exactly out of phase.
The result is a current of up to twice locked rotor
current and four times locked rotor torque.
Auto-transformer starting offers more control than the
star/delta method, however voltage is still applied in
steps. Limitations of auto-transformer starting include:
1. Torque transients caused by switching between
voltages.
2. Limited number of output voltage taps restricts
the ability to closely select the ideal starting
current.
3. High price for models suitable for frequent or
extended starting conditions.
4. Cannot provide an effective reduced voltage start
for loads with varying start requirements. For
instance, a material conveyor may start loaded or
unloaded. The auto-transformer starter can only
be optimised for one condition.
Primary resistance starters also provide greater
starting control than star/delta starters. However, they
do have a number of characteristics that reduce their
effectiveness. These include:
1. Difficult to optimise start performance when
commissioning because the resistance value must
be calculated when the starter is manufactured
and is not easily changed later.
2. Poor performance in frequent starting situations
because the resistance value changes as heat is
generated in the resistors during a start. A long
cool down period is required between starts.

 Loading...
Loading...