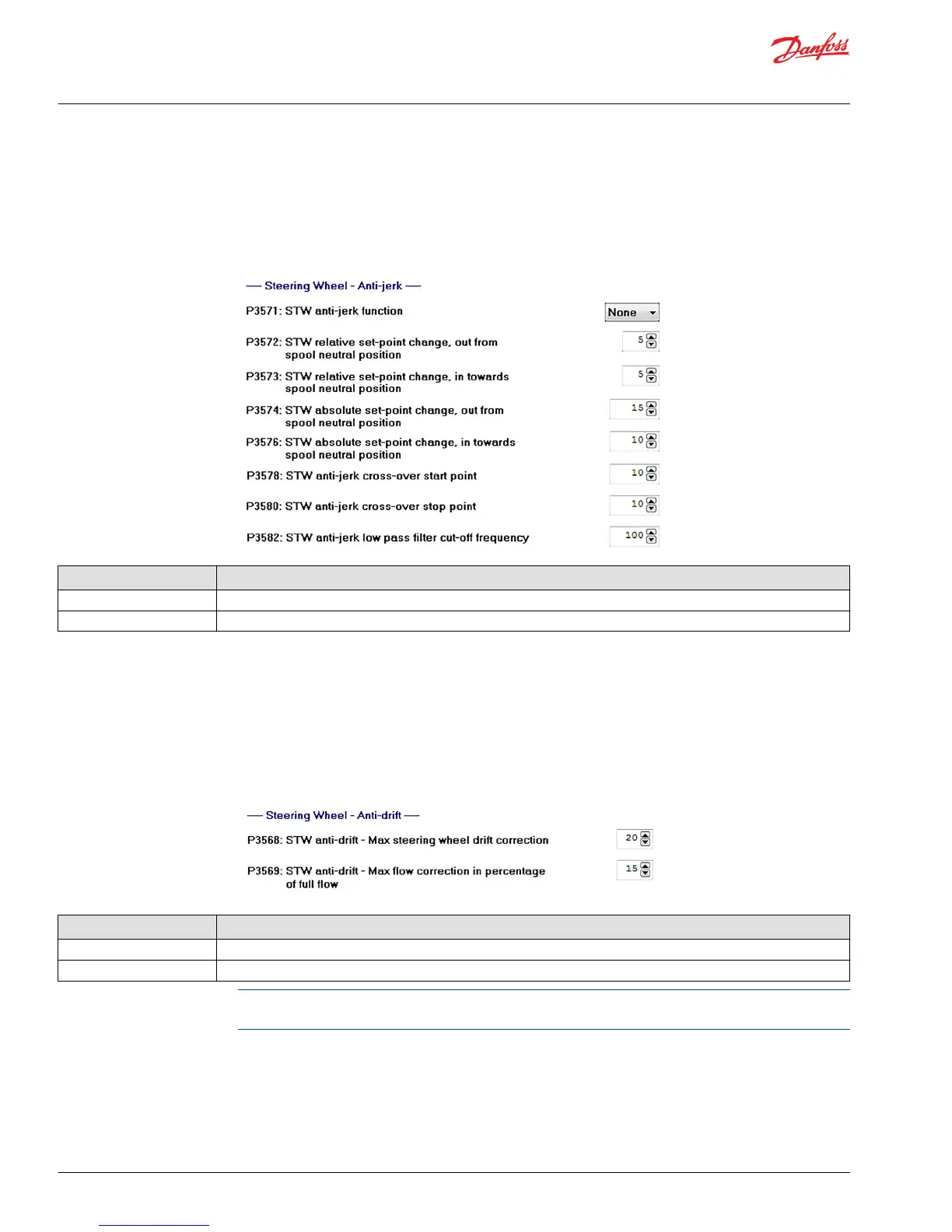
PVED-CLS anti-jerk
Anti-jerk can be used to decrease jerk in articulated vehicles. Changing parameters only effect jerk
originating from the EH spool. Any jerk caused by the orbital will still exist, but amplified flow from
variable rate steering programs will have less jerk.
Example parameter settings
Parameter Conditions for value change
P3571 Change to enable anti-jerk functionality
P3572-P3582 See section 10.6 Anti-Jerk in User Manual for details on setting parameters.
Tuning of anti-jerk will take trial and error. Set values low and increase them until articulated machine
feels responsive but not jerky. The cross-over start and stop points (P3578 and P3580) can stay at defaults
unless extra anti-jerk functionality is required.
PVED-CLS anti-drift
Anti-drift can be used to keep the steering wheel in the same position when driving straight ahead. This
is adjusted by adding a percentage of full flow when the actual steering wheel angle doesn’t match the
ideal steering wheel angle.
Parameter Conditions for value change
P3568 Angle at which maximum correction flow is applied
P3569 Maximum correction flow that can be applied
Default values are recommended for these parameters. See Section 10.5 in the User Manual for more
details.
Application Guide
PVED-CLS startup guide
Parameter setting
26 |
©
Danfoss | October 2018 AB285975085591en-000101

 Loading...
Loading...









