PID for speed control
Below are given a couple of examples of programming
of VLT 5000 PID speed control.
175ZA451.10
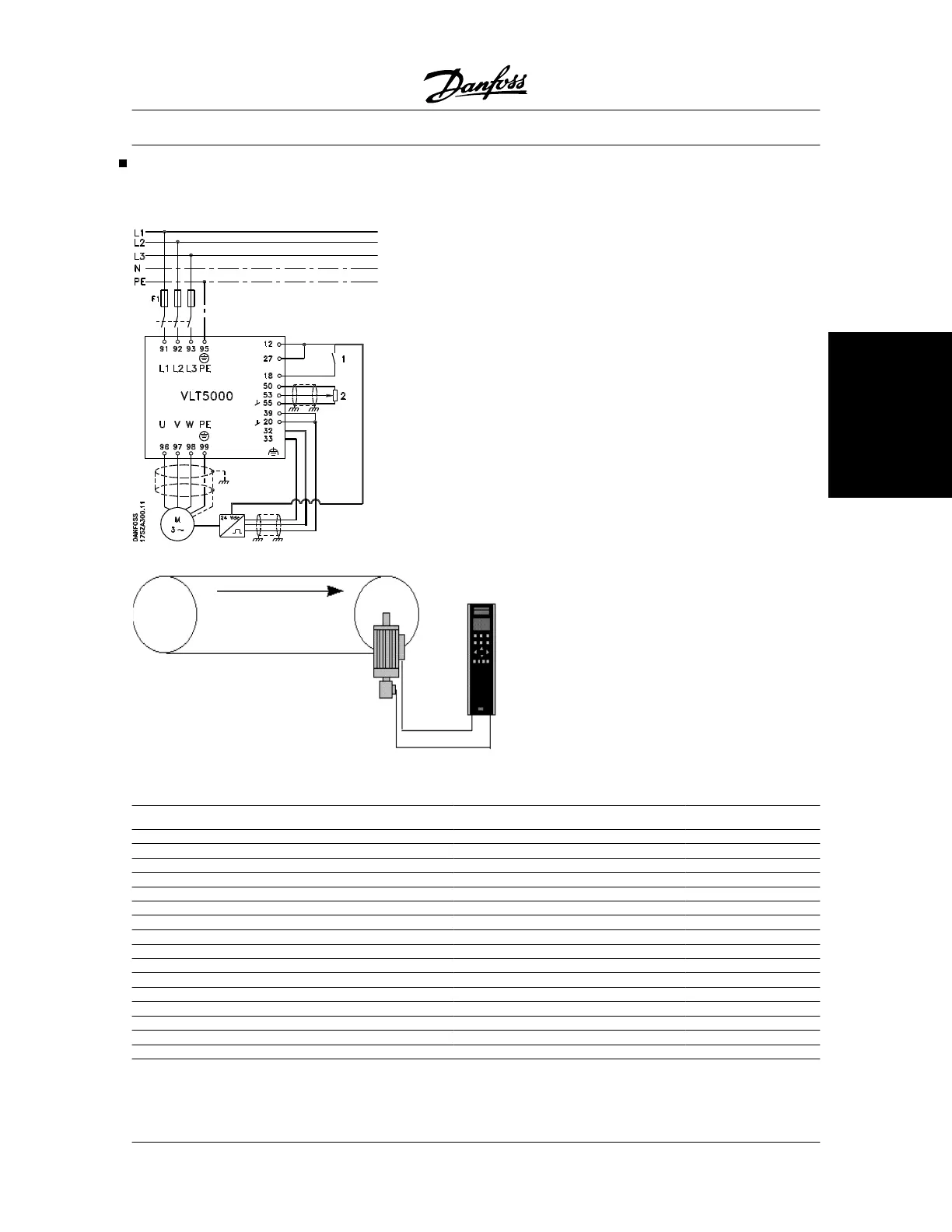
A conveyor belt that carries heavy items must be main-
tained at a regular speed, which is set by means of a
potentiometer within the range of 0-1500 rpm, 0-10
Volts. The speed selected must be kept constant and
the integrated PID speed controller is to be applied.
This is a case of normal control, which means that
when the load increases, the power supplied to the
conveyor belt motor increases in order to keep the
speed constant. Correspondingly, when the load falls,
the power is reduced.
The feedback used is an encoder with a resolution of
1024 pulses/rev. push-pull.
1. Start/Stop
2. Speed reference 0-1500 rpm, 0-10 Volts
3. Encoder 1024 pulses/rev. push-pull.
The following must be programmed in order shown - see explanation of settings in the Operating Instructions:
Function:
Parameter no. Setting Data value no.
Activation of process controller 100
Speed control, closed loop
[1]
Feedback signal 314
Feedback signal
[2]
Terminal 32 306 Encoder feedback, input B [24]
Terminal 33 307 Encoder feedback, input A [25]
Minimum feedback 414 0 rpm
Maximum feedback 415 1650 rpm (max. ref. + 10%)
Reference 308
Reference (factory setting)
[1]
Terminal 53, min. scale 309 0 Volt (factory setting)
Terminal 53, max. scale 310 10 Volt (factory setting)
Minimum reference 204 0 rpm
Maximum reference 205 1500 rpm
Min. speed 201 0 Hz
Max. speed 202 75 Hz
Proportional gain 417
Application-dependent
Integration time 418
Application-dependent
Differentiation time 419
Application-dependent
VLT
®
5000 Series
MG.51.C5.22 - VLT
p
is a registered Danfoss trademark. 175
Examples of use
 Loading...
Loading...


