ASDA-A2 Chapter 8 Parameters
Revision February, 2017 8-225
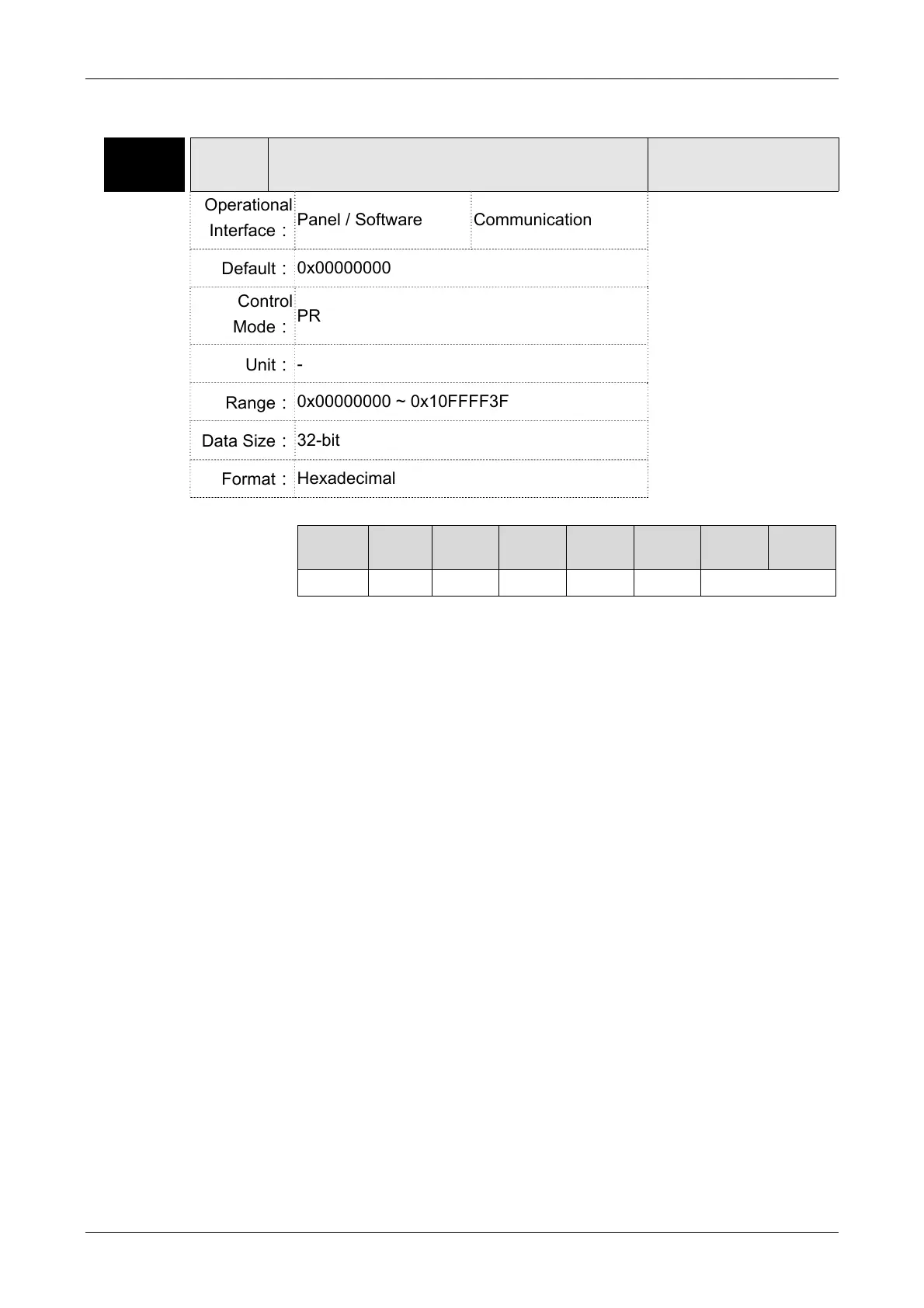
P6-xx PR Parameters (Please refer to Chapter 7 for detailed setting)
P6-00 ODEF Homing Definition
Address: 0600H
0601H
Operational
Interface:
Panel / Software Communication
Related Section;
7.10
Default:
0x00000000
Control
Mode:
PR
Unit:
-
Range:
0x00000000 ~ 0x10FFFF3F
Data Size:
32-bit
Format:
Hexadecimal
Settings:
Homing definition:
.31 ~
28
.27 ~
24
.23
~20
.19 ~
16
.15 ~
12
11 ~ 8 7 ~ 4 3 ~ 0
BOOT - DLY - DEC1 ACC PATH
PATH: Path type (64-bit)
0: Stop: Homing complete and stop
1 ~ 3F: Auto: Homing complete and execute the specified path
(Path#1 ~ Path#63)
ACC: Select 0~F for acceleration time and corresponds to
P5-20~P5-35.
DEC1: The deceleration time selection of 1
st
homing, the setting
value of DEC is 0~F and corresponds to P5-20 ~ P5-35.
DLY: Select 0~F for the delay time and corresponds to P5-40 ~ P5-55
BOOT: When the servo drive applies to the power, if it will be executed
searching the origin.
0: Do not do homing
1: Execute homing automatically (SRV ON for the first time
after applying to power)
Apart from the above mentioned definition, the related setting of
homing also includes:
1. P5-04 Homing mode
2. P5-05 ~ P5-06 Speed setting of searching the origin
3. P6-01: ORG_DEF is the location of the origin. It may not be 0. This
function is the offset of coordinate system.
A. After the origin is found (Sensor or Z); it has to decelerate to stop.
The stop position will exceed the origin for a short distance.

 Loading...
Loading...