
Do you have a question about the Delta ASDA-A2 Series and is the answer not in the manual?
| Enclosure Rating | IP20 |
|---|---|
| Control Mode | Position, Speed, Torque |
| Communication Interface | RS-485, CANopen |
| Protection | Overcurrent, Overvoltage, Undervoltage, Overload, Overtemperature, Encoder error |
| Operating Temperature | 0°C to 55°C |
| Storage Temperature | -20°C to 65°C |
| Humidity | 20% to 90% RH (non-condensing) |
| Altitude | 1000m max |
| Cooling Method | Natural cooling or forced air cooling |
| Encoder Feedback | 20-bit incremental encoder (standard), 17-bit absolute encoder (optional) |
Pre-operation checks for product condition and functionality.
Nameplate information and detailed model code explanation for ASDA-A2 and ECMA series.
Matching specifications for servo drives and motors across different voltage series.
Identification and function of various parts of the servo drive.
Important notes on connections, voltage, and wiring.
Environmental conditions required for installing the servo drive and motor.
Guidelines for correct mounting and ventilation space.
Recommended circuit breakers and fuses for various series.
Recommendations for EMI filters and installation precautions.
Guidelines for selecting regenerative resistors.
Wiring information for 220V series servo drives.
How to connect external devices to the servo drive.
Detailed description of servo drive connectors and terminals.
Wiring methods for single-phase and three-phase power.
Specifications for motor power cables.
Specifications for encoder cable connectors.
Wiring information for 400V series servo drives.
How to connect external devices to 400V series drives.
Detailed description of 400V series drive connectors and terminals.
Wiring methods for 400V series servo drives.
Basic wiring diagrams for 220V and 400V series.
Details on connecting I/O signals to the CN1 connector.
Pinout and layout of the CN1 connector.
Explanation of signals for the CN1 connector.
Details on the CN2 connector for motor encoder connection.
Information on wiring the CN3 connector for communication.
Details on the CN4 serial connector for PC connection via USB.
Information about the CN5 connector for full-closed loop applications.
Details on the CN6 connector for CANopen communication.
Standard wiring examples for the 220V series.
Standard wiring examples for the 400V series.
Detailed explanation of the servo drive's front panel components and their functions.
Step-by-step guide for setting parameters using the front panel.
Explanation of various status indicators and displays on the panel.
General operational functions accessible via the panel.
Pre-operation checks on the motor and drive without load.
Correct procedure for applying power to the servo drive.
Procedure for testing motor operation in JOG mode without load.
Steps for trial running the motor in speed mode without load.
Steps for trial running the motor in position mode without load.
General procedure for tuning the servo system.
Description of single, dual, and multi-control modes.
Detailed explanation of position control mode.
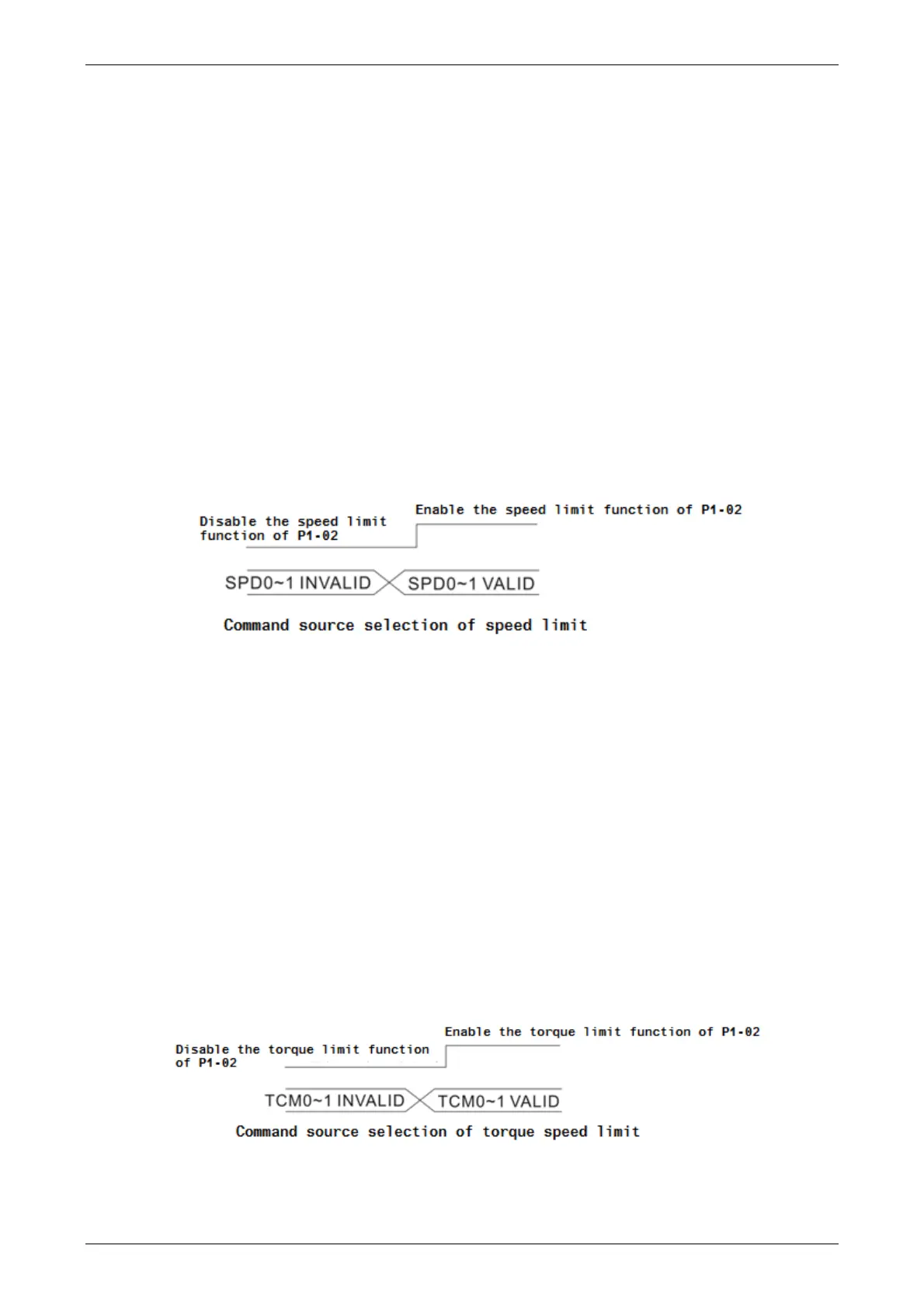
Detailed explanation of speed control mode.
Detailed explanation of torque control mode.
Explanation of dual mode operations.
Overview of the motion control capabilities of the ASDA-A2 series.
Information about system parameters, monitoring variables, and data arrays.
Explanation of the different motion axes and their attributes.
Detailed description of the PR (Procedure) mode.
How to perform homing operations in PR mode.
Overview of parameters related to motion control and PR mode settings.
Detailed explanation of the Electronic Cam (E-Cam) function.
Explanation of parameter grouping and naming conventions.
A comprehensive list of parameters, their abbreviations, functions, and related sections.
Detailed descriptions of various parameters, categorized by group.
List of servo drive alarms, their descriptions, corresponding DO signals, and servo status.
Troubleshooting for CANopen communication alarms and corrective actions.
Troubleshooting for motion control related alarms and corrective actions.
Detailed breakdown of common causes and corrective actions for various alarms.
General corrective actions for various alarm codes.







