Chapter 12 Absolute System ASDA-A2
Revision February, 2017 12-17
12.3.3 PUU Counting
A 32 bits number with sign is used to denote PUU number in an absolute system. The PUU
number is increasing when motor is in positive rotating direction and decreasing for a negative
running direction. The motor’s rotating direction is defined in P1-01 Z setting.
In a word, the encoder feedback number is an easy way to distinguish the motor’s rotating direction.
Increasing number sequence is for positive direction and decreasing number sequence is for
negative direction.
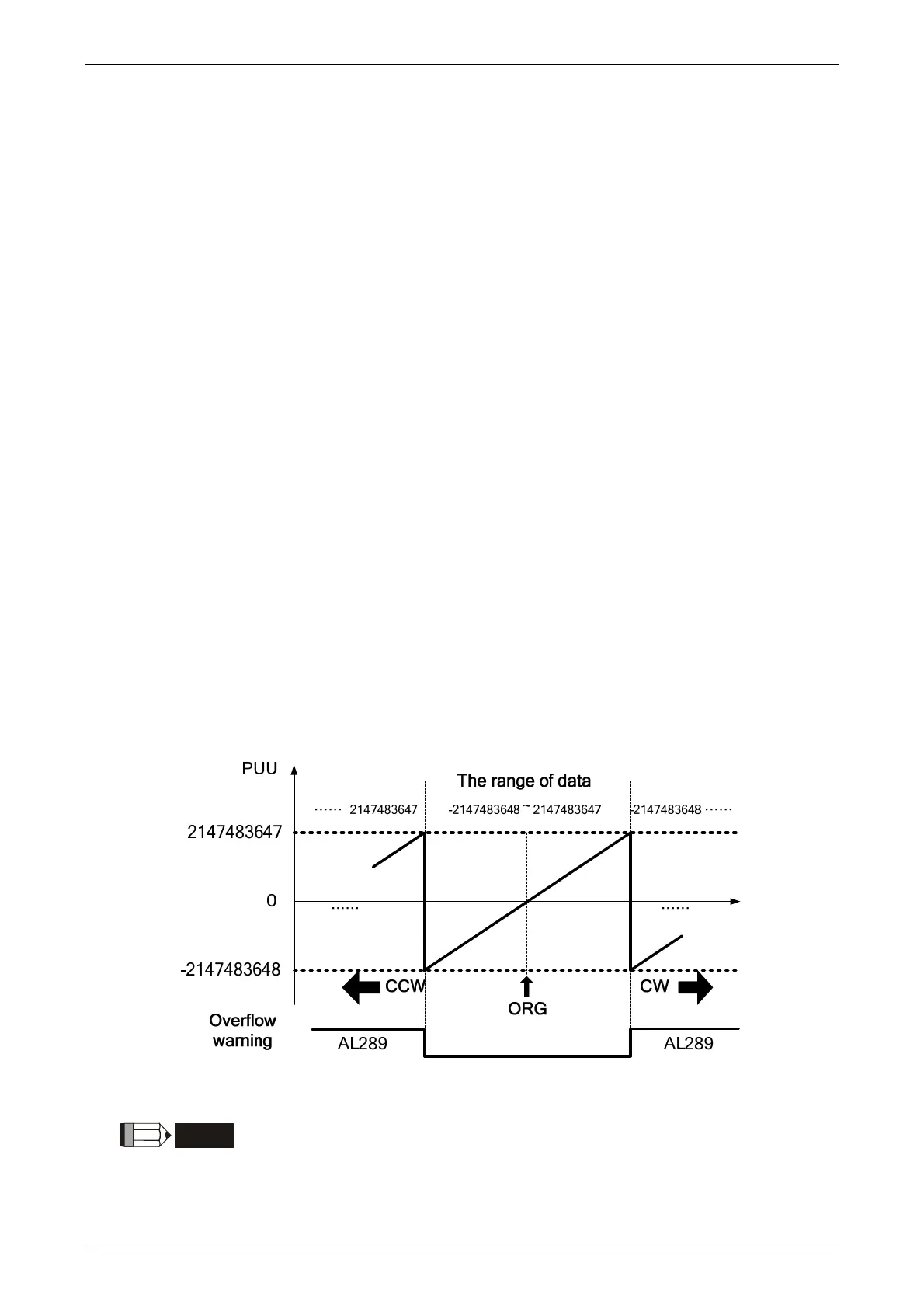
If the motor keeps rotating in one direction, the AL062 will be shown when exceeding the number
range -32768 to 32767 for turns, and the AL289 is for PUU out of the range -2147483648 to
22147483647. Both of these fault codes can be cleared by homing.
And the parameter P2-70 can be used to take the range restrictions away in order to avoid
occurring AL062 and AL289. When the counting number reaches the maximum number, the PUU
pulse number sequence for forward rotation is … 2147483647, -2147483648, -
2147483647…where the number sequence -2147483648, 2147483647, 2147483646… is for
reverse rotation. Two examples for evaluating the timing of overflow are as below:
Example 1:
When P1-44=128 and P1-45=10, there are 100000 PUU for motor to rotate one turn. 2147483647
÷ 100000 ≒ 21474.8. The limit to trigger the fault AL289 is 21474.8 (< 32767).
Example 2:
When P1-44=128 and P1-45=1, there are 10000 PUU for motor to rotate one turn. 2147483647 ÷
10000 ≒ 214748.3. The limit to trigger the fault AL062 is 32767 (< 214748.3).
Figure 12.2 PUU counting in absolute coordinate system
NOTE
When an absolute system has been initialized, if the parameter P1-01 Z
setting, P1-44, and P1-45 be changed, the absolute coordinate system will be
destroyed. A homing procedure is necessary at that moment.