24 ADV20 QS, V1.02
Italiano English
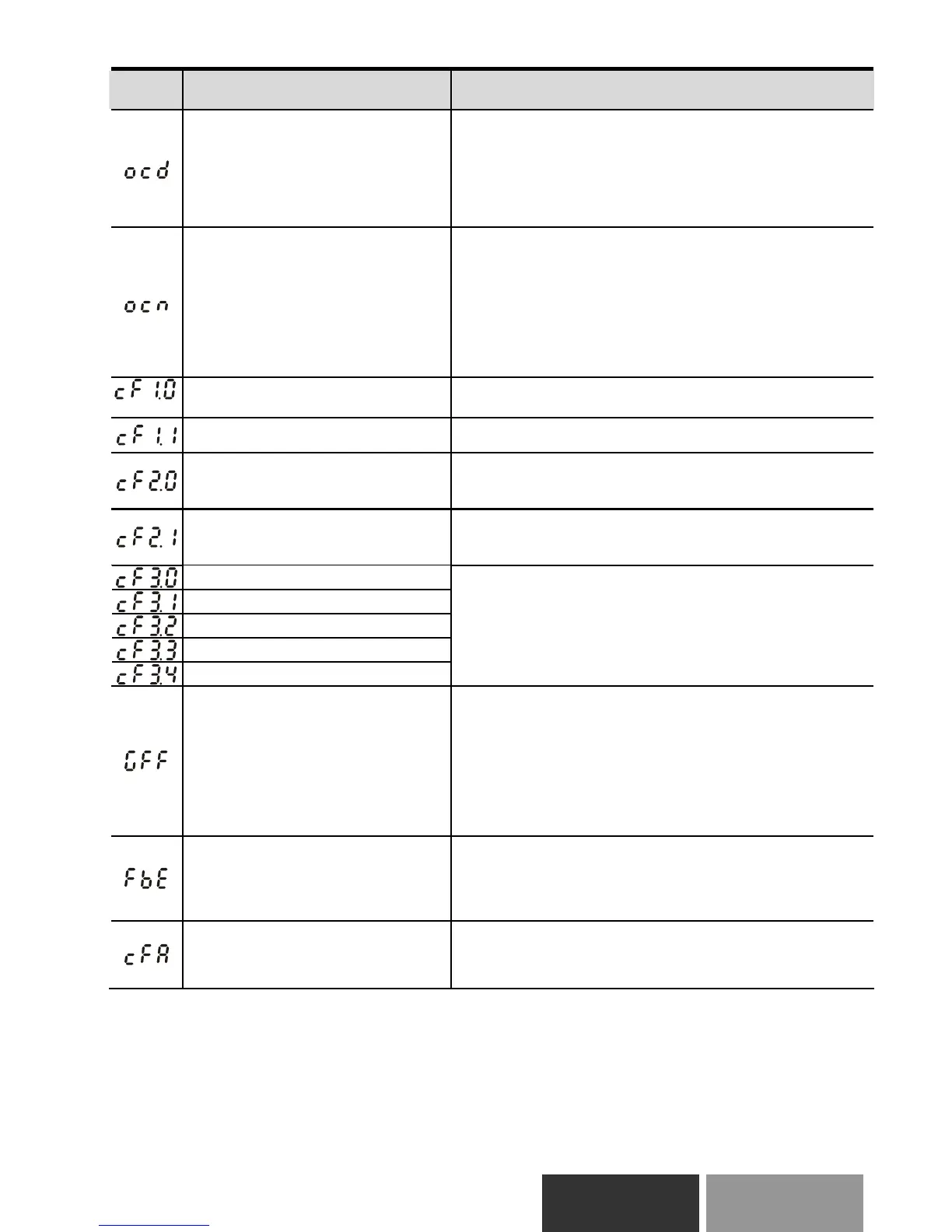
Nome
guasto
Descrizione guasto Azioni correttive
Sovracorrente in fase di
decelerazione
1. Cortocircuito all'uscita del motore: Verificare un
eventuale isolamento insufficiente sulla linea di uscita.
2. Tempo di decelerazione troppo breve: Aumentare il
tempo di decelerazione.
3. La potenza di uscita del drive CA è troppo bassa:
Sostituire il drive CA con un modello di potenza
immediatamente superiore.
Sovracorrente in fase di
funzionamento costante
1. Cortocircuito all'uscita del motore: Verificare un
eventuale isolamento insufficiente sulla linea di uscita.
2. Improvviso aumento del carico del motore. Verificare un
possibile stallo del motore.
3. La potenza di uscita del drive CA è troppo bassa:
Sostituire il drive CA con un modello di potenza
immediatamente superiore.
Impossibile programmare il circuito
integrato EEPROM.
Contattare l’Assistenza Tecnica di Gefran.
Impossibile programmare il circuito
integrato EEPROM.
Contattare l’Assistenza Tecnica di Gefran.
Impossibile leggere il circuito
integrato EEPROM.
1.
Premere il tasto RESET per riportare tutti i parametri ai
valori di fabbrica.
2.
Contattare l’Assistenza Tecnica di Gefran.
Impossibile leggere il circuito
integrato EEPROM.
1.
Premere il tasto RESET per riportare tutti i parametri ai
valori di fabbrica.
2.
Contattare l’Assistenza Tecnica di Gefran.
Errore fase U
Errore fase V
Errore fase W
OV o LV
Errore sensore di temperatura
Contattare l’Assistenza Tecnica di Gefran.
Guasto a terra
Quando un morsetto di uscita è collegato a terra, la corrente
di corto circuito è superiore al 50% della corrente nominale
del drive CA e il modulo di potenza del drive CA può essere
danneggiato.
NOTA: È prevista una protezione da cortocircuito per
proteggere il drive CA, non per la protezione dell'utente.
1. Controllare se il modulo di potenza IGBT è danneggiato.
2. Verificare un eventuale isolamento insufficiente sulla
linea di uscita.
Errore segnale di retroazione PID
1. Controllare le impostazioni di parametro (Pr.10.01) e il
cablaggio AVI/ACI.
2. Controllare la presenza di eventuali errori tra il tempo di
risposta del sistema e il tempo di rilevamento del segnale
di retroazione PID (Pr.10.08).
Errore
autoaccelerazione/decelerazione
1. Controllare se il motore è adatto al funzionamento tramite
il drive CA.
2. Controllare un eventuale eccesso di energia rigenerativa.
3. Il carico può essere cambiato improvvisamente.
 Loading...
Loading...







