83
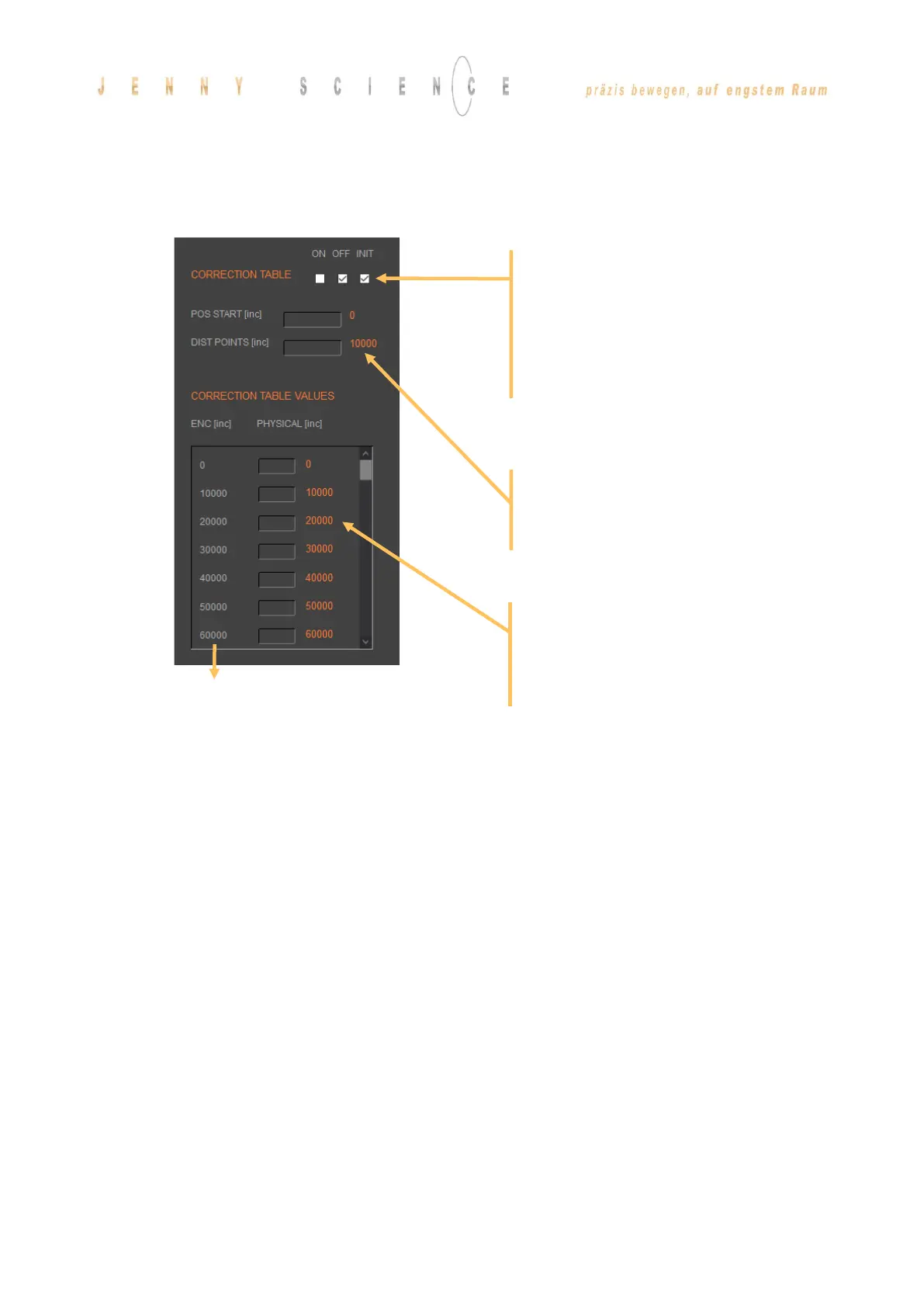
Input the correction values with WebMotion®:
With the navigation setup/reference in case of
LINAX® or ELAX®
Notes to correction table:
• For the positions outside of the correction table,
the correction of the first respectively the last entry
in the correction table holds valid. For example the
last entry is „ENC:100‘000 -> PHYSICAL 100‘017“, so
for the encoder position of 110‘000 the physical
value of 110‘017 is considered.
• The position values between the table entries are
interpolated.
• The correction table is saved in the application data
of the XENAX® servo controller.
• After a reset of the XENAX® servo controller
(command “RES”), the correction table will be
initialized and deactivated (physical position =
encoder position).
• During the measurement of the physical position
values, the correction table has to be deactivated.
interferometer.
If you enter a G8000 by command, and the laser
interferometer reads the physical position 8011,
you can put it in the table and press ENTER to
value = encoder value
OFF Correction not active, moving commands refer to
encoder position value
ON Correction table active, moving commands refer
to physical position value

 Loading...
Loading...