Function library
Function blocks
3.5.53 Phase integrator (PHINT)
3−242
l
EDSVS9332P−EXT DE 2.0
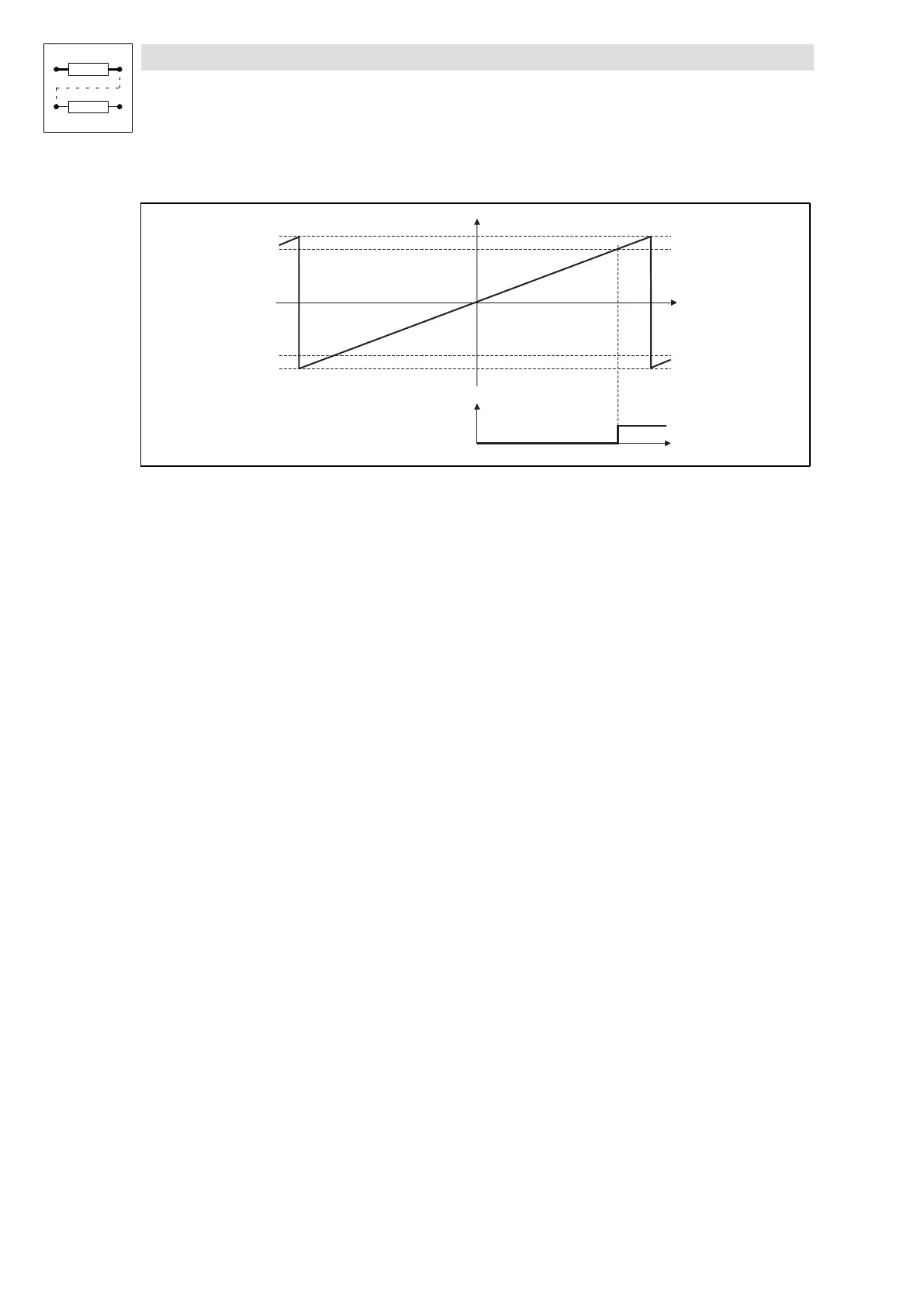
3.5.53.1 Constant input value
P H I N T 3 - O U T
+ 3 2 7 6 7 r e v .
- 3 2 7 6 7 r e v .
+ C 1 1 5 1
- C 1 1 5 1
t
t
P H I N T 3 - S T A T U S
Fig. 3−190 Function of PHINTx with constant input value
l
The FB integrates speed or velocity values at PHINTx−IN to a phase (distance).
l PHINTx−OUT outputs the count of the bipolar integrator.
– A positive value at PHINTx−IN increments the integrator (count is increased).
– A negative value at PHINTx−IN decrements the integrator (count is reduced).
l If the count exceeds the value of +32767 encoder revolutions (¢ +2147483647 inc)
– an overflow occurs. The counting is continued with the value −32768.
– PHINTx−FAIL switches to HIGH when the value ³ +32000 is reached
l If the count falls below the value of −32768 encoder revolutions (¢ −2147483648 inc)
– an overflow occurs. The counting starts at the value +32767.
– PHINTx−FAIL switches to HIGH when the value v −32000 is reached.
l PHINTX−RESET = HIGH
– sets the integrator to 0
– Sets PHINTx−OUT = 0, as long as a HIGH level is applied to PHINTx−IN.
– Sets PHINTx−FAIL = LOW.
 Loading...
Loading...