Function library
Positioning control
3.4.3 Positioning modes (C1210)
3−32
l
EDSVS9332P−EXT DE 2.0
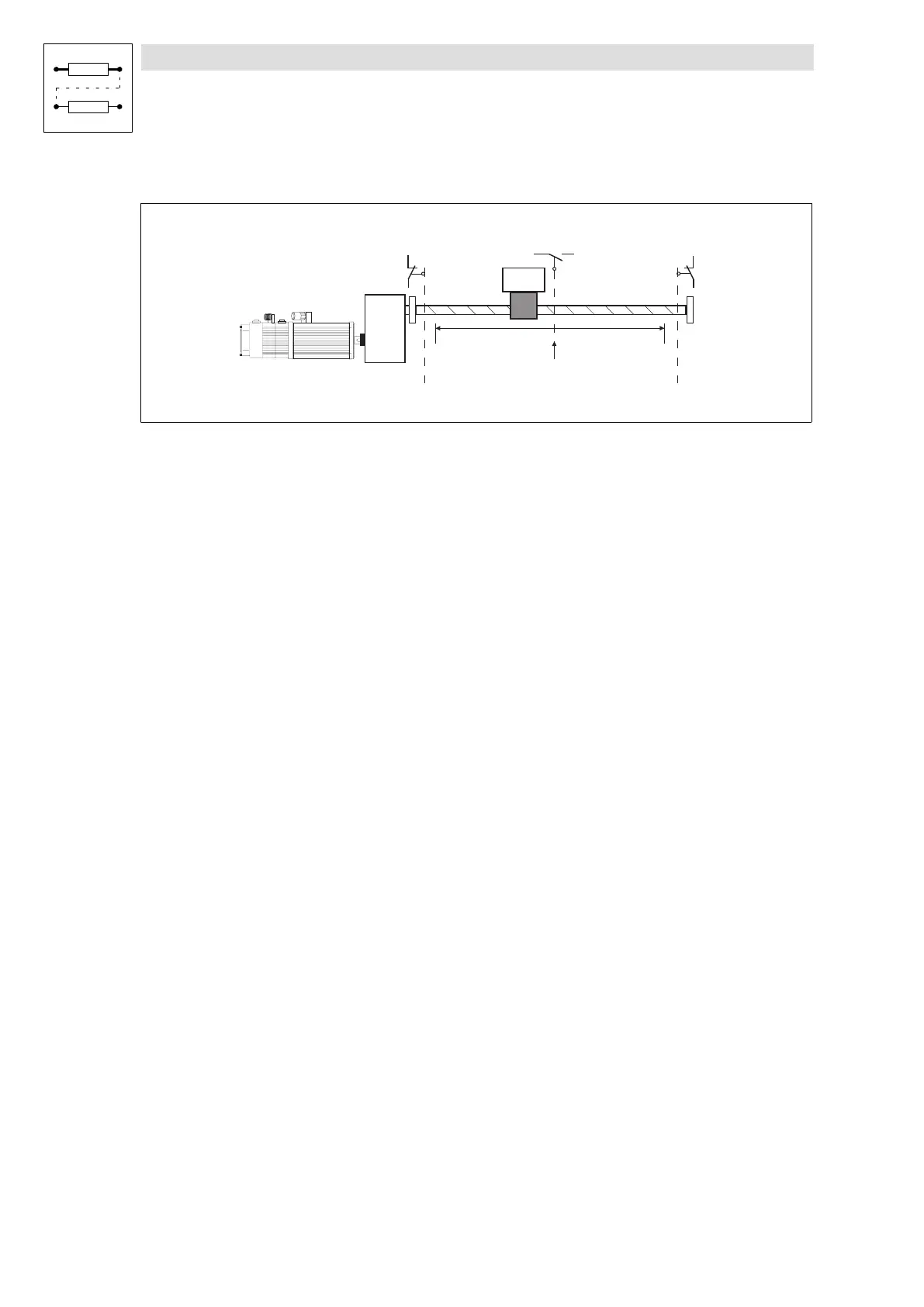
3.4.3.2 Absolute positioning
9300POS025
S1S2 S3
Home position
Limit position
negative
C1224 C1223
End of travel switch
positive direction
POS-LIM-NEG
POS-LIM-POS
POS-REF-MARK
End of travel switch
negative direction
Limit position
positive
Fig. 3−10 Example of a machine with finite traversing range
Purpose
l Use in applications with finite traversing range, e. g. in warehousing or handling machines.
Function
l Set positioning mode (C1210) = 0 (default setting)
l Before starting a positioning drive homing must be carried out (output POS−REF−OK=1,
homing status C1284 = REF−OK"). By homing the reference point of the measuring system to
the machine is determined ( 3−46)
l In the absolute positioning mode absolute and relative target positions can be approached.
There are two measuring systems ( 3−34):
– the machine measuring system and
– the real measuring system
l The travel range limit switches are located in front of the mechanical stops. They prevent the
drive from touching the stops.
l Adjustable position limiting values (C1223, C1224) prevent the travel range limit switches from
being approached under normal operating conditions. A target position located outside the
position limiting value is not approached. In this case a fault is indicated (P04, P05).
 Loading...
Loading...

