6.
PROGRAMMING
/
~~~
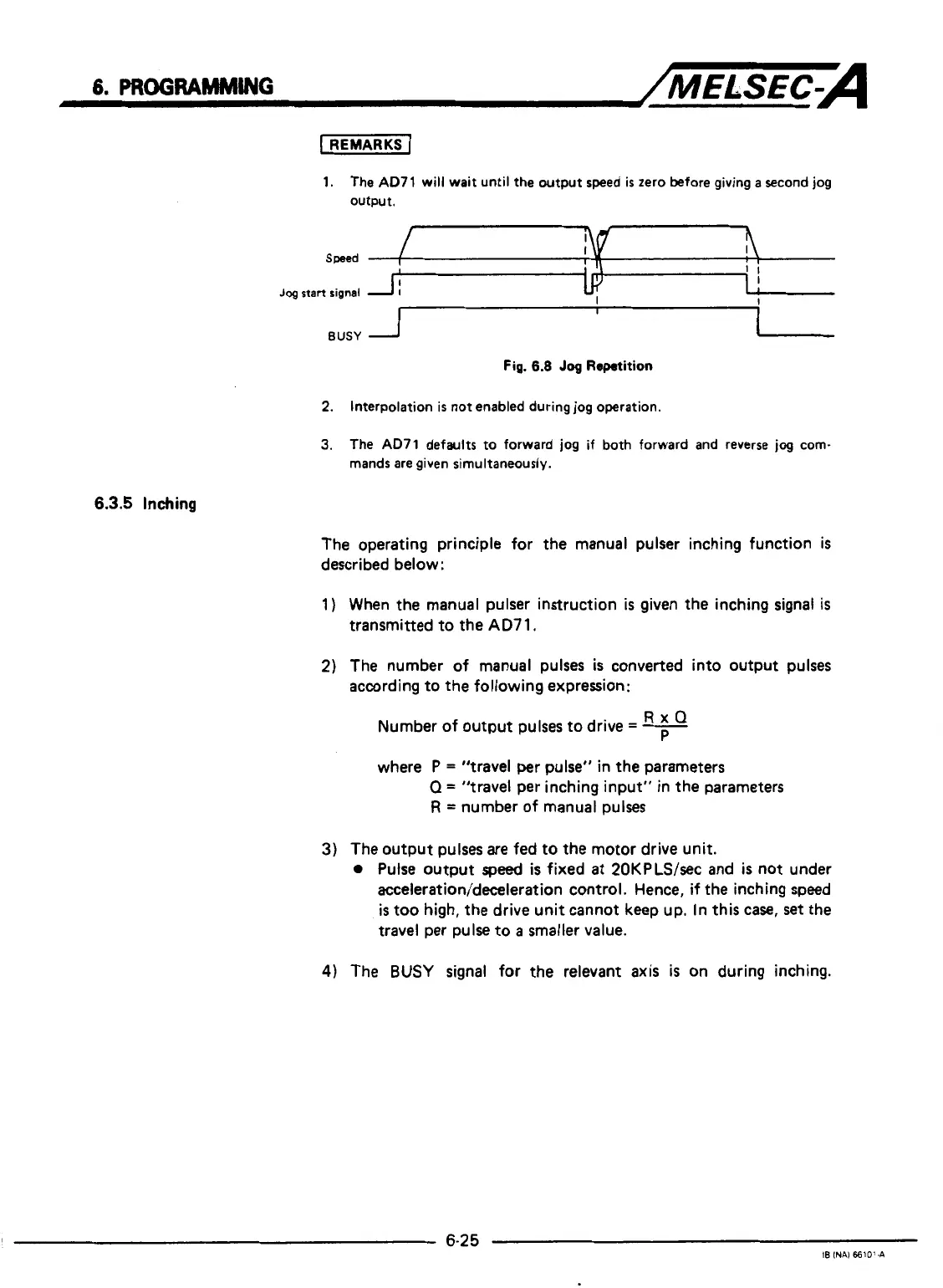
1. The AD71 will wait until the output speed
is
zero before giving
a
second jog
output.
Fig.
6.8
Jog
Repetition
2.
Interpolation
is
not enabled during jog operation.
3.
The AD71 defaults
to
forward jog if
both
forward and reverse
jog
corn.
mands are given simultaneously.
6.3.5
Inching
The operating principle for the manual pulser inching function
is
described below:
1)
When the manual pulser instruction
is
given the inching signal
is
transmitted to the
AD71.
2)
The number of manual pulses
is
converted into output pulses
according to the following expression:
Number of output pulses to drive
=
p
RxQ
where
P
=
"travel per pulse" in the parameters
0
=
"travel per inching input" in the parameters
R
=
number of manual pulses
3)
The output pulses are fed to the motor drive unit.
0
Pulse output
speed
is
fixed
at
20KPLS/sec and
is
not under
acceleration/deceleration
control. Hence,
if
the inching speed
is
too high, the drive unit cannot keep up. In this
case,
set
the
travel per pulse to
a
smaller value.
4)
The
BUSY
signal for the relevant
axis
is
on during inching.
i
6-25
I6
INAI
6610'-A
1
 Loading...
Loading...





