16
1. Overview
1.1. Overview
This document describes procedures for connections and settings required for
constructing robot vision applications by connecting your robot controller to the Vision
Sensor FH/FHV (hereafter referred to as Vision Sensor).
Utilizing this document at startup can reduce man-hours to connect the Vision Sensor
to your robot controller, set the Vision Sensor, and create robot programs.
Robot Vision applications described in this document are as follows.
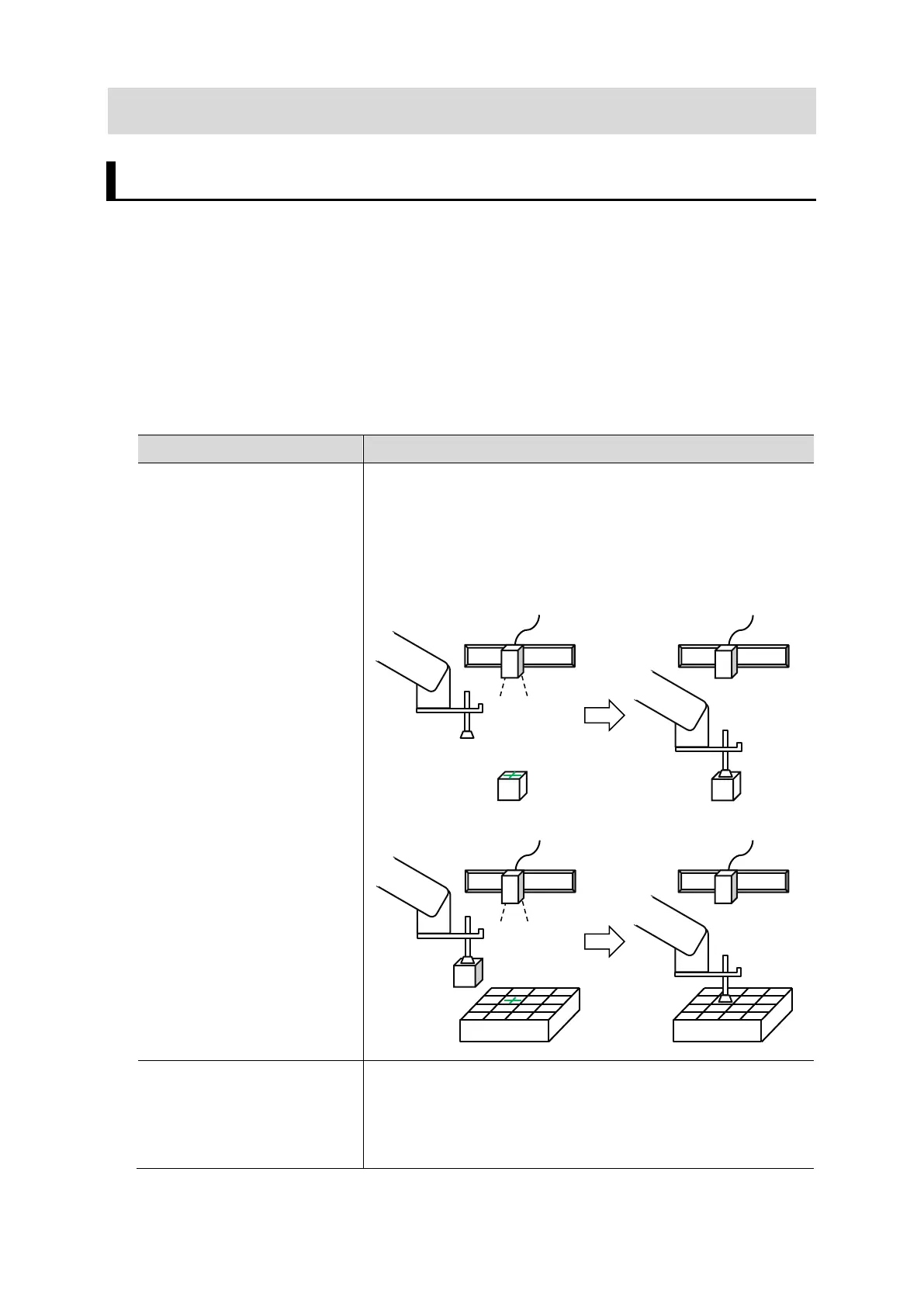
Pick/Place with a fixed
camera
In a robot vision system with a fixed camera mounted,
the robot can pick and place a workpiece.
The Vision Sensor measures the target workpiece for
Pick/Place and outputs a robot position for Pick/Place to
the robot controller.
Grip Correction with a
fixed camera
In a robot vision system with a fixed camera mounted,
a position deviation from the reference position of a
picked workpiece can be corrected.
The Vision Sensor measures the workpiece, calculates

 Loading...
Loading...














