Appendices
A - 32
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
• These object mappings can be changed only when the EtherCAT communications state is
Pre-Operational (Pre-Op).
• Since the mappings you changed are not saved in EEPROM, you must specify objects each time you
turn ON the power of the G5-series Servo Drive in order to use the mapping other than the default
setting.
• You can map up to 10 objects in a PDO mapping. If you attempt to map 11 or more objects, a
Function Setting Error (Error No. 93.4) will occur.
• The communications cycle you can set varies depending on the total size of mapped objects.
For details, refer to A-1-3 Communications Cycles and Corresponding Modes of Operation on page
A-5. If the number of the mapped objects is 0, a Function Setting Error (Error No. 93.4) will occur.
• If you map the same object more than once, the value of the last object will be enabled.
• In the following cases, an ABORT code is returned.
Writing when the EtherCAT communications state is Safe-Operational (Safe-Op) or Operational
(Op)
Writing with non-existent objects specified
Writing with incorrect object size specified
Writing with objects that cannot be mapped in the PDO mapping specified
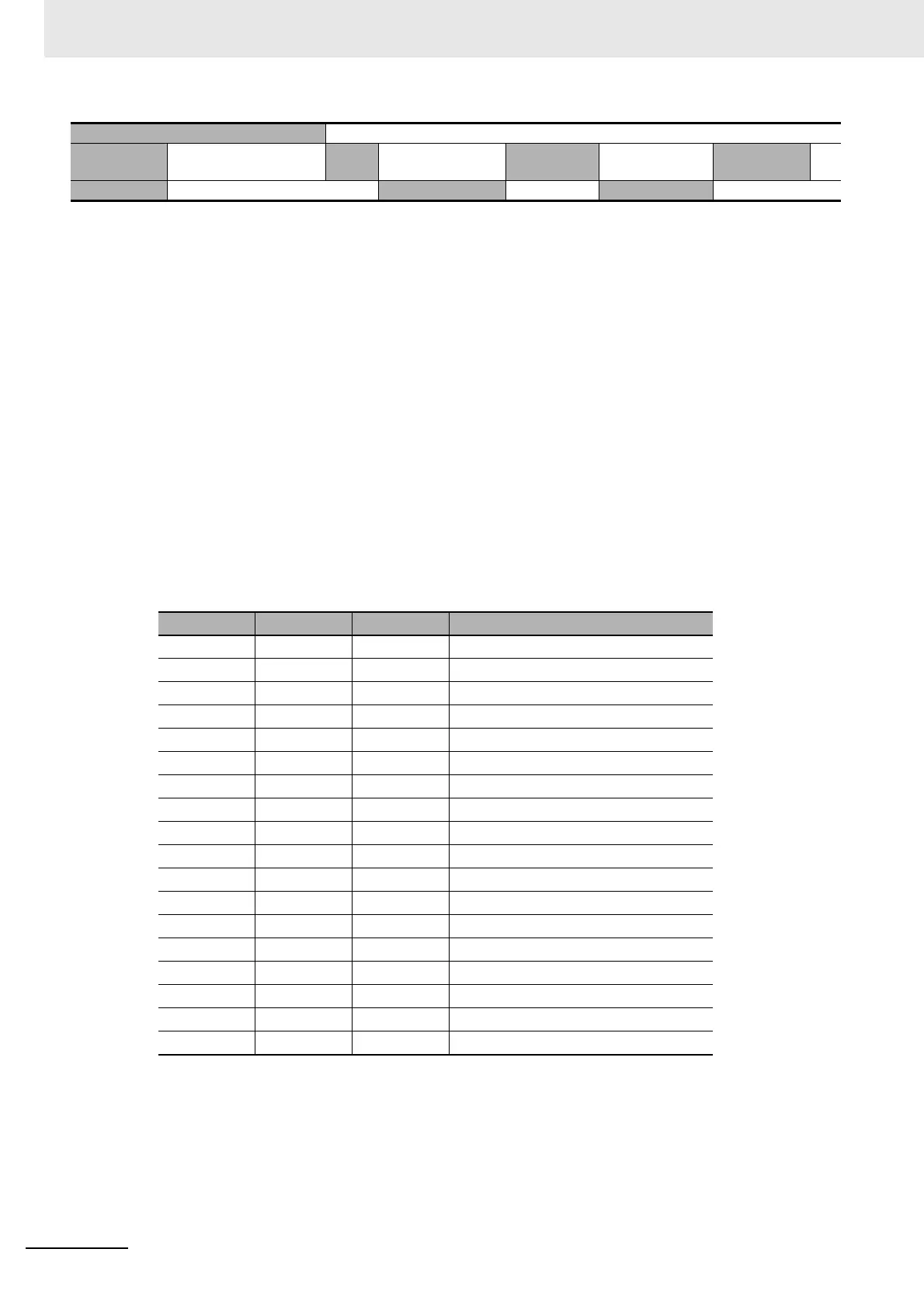
• The following objects can be mapped to the Receive PDO mapping.
Sub-index 0A hex PDO entry 10 (10th Output Object to be mapped)
Setting
range
–
Unit
–
Default
setting
0000 0000 hex Data
attribute
D
Size 4 bytes (U32) Access RW PDO map Not possible
Index Sub-index Bit length Name
4103 hex 00 hex 10 hex Coordinate System Setting Mode
4104 hex 00 hex 20 hex Coordinate System Setting Position
6040 hex 00 hex 10 hex Controlword
6060 hex 00 hex 08 hex Modes of operation
6071 hex 00 hex 10 hex Target torque
6072 hex 00 hex 10 hex Max torque
607A hex 00 hex 20 hex Target position
607F hex 00 hex 20 hex Max profile velocity
6081 hex 00 hex 20 hex Profile velocity
6086 hex 00 hex 10 hex Motion profile type
60B0 hex 00 hex 20 hex Position offset
60B1 hex 00 hex 20 hex Velocity offset
60B2 hex 00 hex 10 hex Torque offset
60B8 hex 00 hex 10 hex Touch probe function
60E0 hex 00 hex 10 hex Positive torque limit value
60E1 hex 00 hex 10 hex Negative torque limit value
60FE hex 01 hex 20 hex Physical outputs
60FF hex 00 hex 20 hex Target velocity
 Loading...
Loading...