Dedicated Commands
MP150 Protocol Rev. B4 Aug 2019 29
• Advanced Average: The maximum and the average of the pixels of the x consecutive lines will
be calculated. An additional parameter y gives the threshold for the following selection:
If |max[pixel] – avg[pixel]| > y then max is taken, otherwise avg.
I y = 0 then the system will take its own threshold which bases on the estimated noise.
In addition to averaging over multiple lines it is possible to average pixel within one line if not the full
resolution is used; please refer to section 4.3.1.
This processing is executed before the calculation of sectors and alarms, to increase the signal-to-noise
ratio of the system.
5.8 Switching the Laser
The laser is controlled with the command XL:
• XL1 and XL0 will switch the laser on and off.
• XLT allows switching the laser with the trigger input. The first trigger impulse (of at least 1sec)
will switch it on and the following one will switch it off.
The laser is switched off automatically after 10 minutes and outside the temperature range of 5 to 50°C
(41 to 122°F).
5.9 Field of View Considerations
The field of view can be switched between 45° and 90°, with the following limitations (which are mainly
caused by the motor encoder):
countOfPixels * scanFrequency * 90° / fieldOfView <= 512pixel * 80Hz
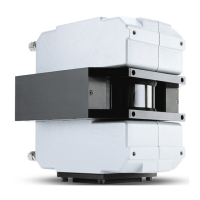
The following table shows the consequences of this equation:
In addition we can state:
countOfPixel
45°
<= countOfPixel
encoder
/ 2
with countOfPixel
encoder
: 1024 (<= 40 Hz), 512 (<= 80 Hz) and 256 (> 80 Hz)
With the MP150 and Ethernet the 45° mode is depreciated. In the MP50 it did really raise the resolution
– in the MP150 it makes only sense to reduce the amount of data to be sent.
5.9.1 Why the Field of View Command does not send a NAK?
A program which configures the scanner will usually work with a list of commands and the order of
commands in this list is usually fixed. Imagine two cases:
a) The list is VF1, PM3 (45°, 256) and the scanner is at this moment configured to 90°, 512. If the
scanner would send a NAK the program (with its fixed list) would generate an error after sending
VF1 and would never start with this scanner.