9EN
3. INTRODUCTION
3.2.
3.2.1.
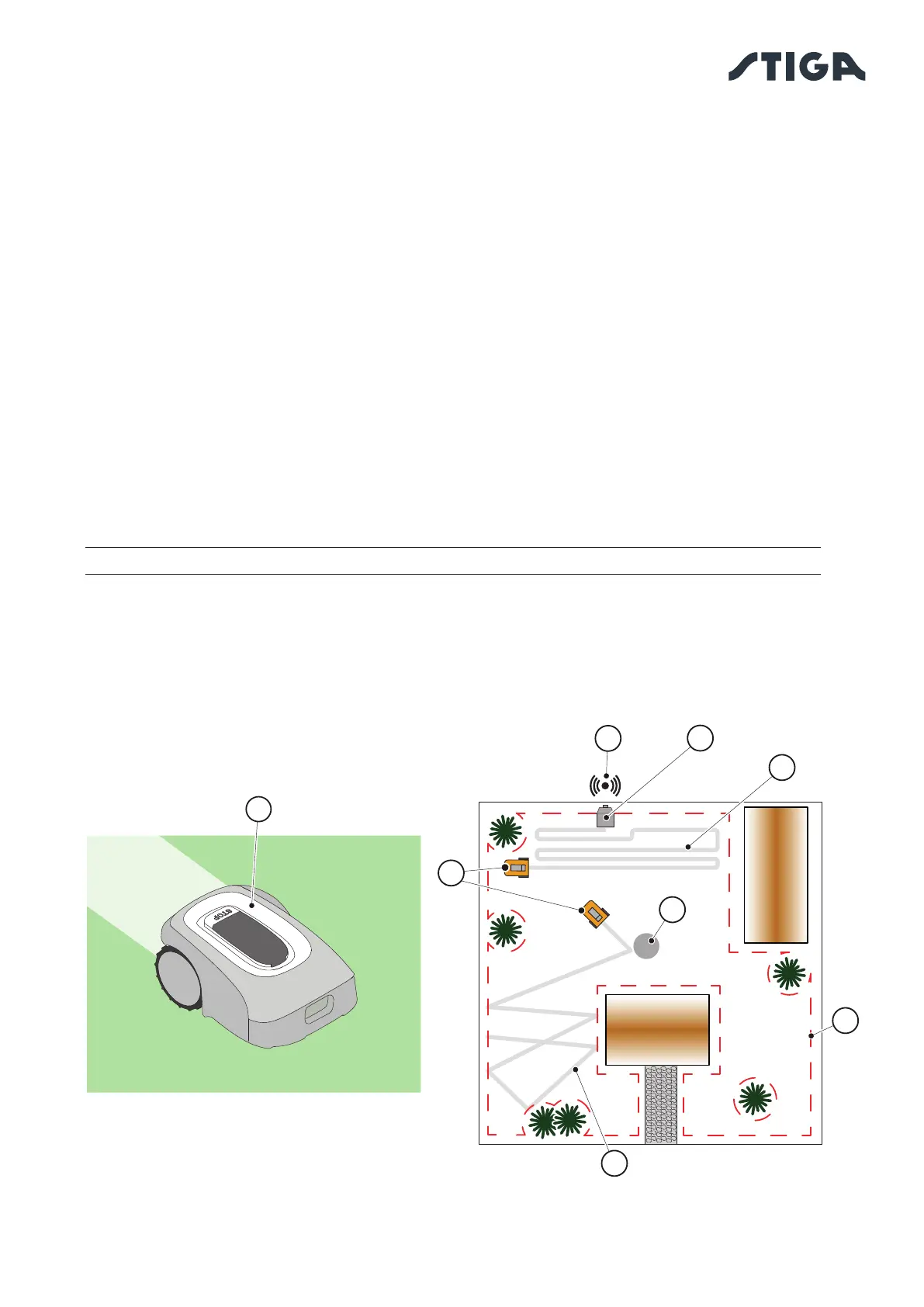
The robot lawn mower (A) is designed and built to automatically cut garden grass at any time of day and
night.
Depending on the characteristics of the surface to be mowed, the robot lawn mower can be programmed
to work across multiple zones delimited by a virtual boundary and connected by virtual relocation routes.
When operating, the robot lawn mower mows the area delimited by the virtual perimeter (B) When the
robot lawn mower is close to the virtual boundary (B) or encounters an obstacle (C) it changes trajectory
according to the selected navigation strategy: random (D), along parallel lines (E) or others.
The robot lawn mower mows the delimited lawn automatically and completely.
The product operates via satellite signals and requires the installation of a charging base (Fig. 2.F, 2G) and
an integrated Satellite Reference Station (Fig. 3.C), that can be installed separately. The robot lawn mower
and the Satellite Reference Station communicate with each other via 3G/4G modules tted with SIM cards.
The robot lawn mower operating technology is based on the communication of data between the STIGA
Cloud and the robot itself. The subscription fee is mandatory in order for Stig-A to operate and depends on
the amount of data requested. A smart phone is also required for the product to be used.
Any other usage may be hazardous and harm persons and/or damage things. Improper use includes (for
example, but not limited to): transporting people, children or animals on the machine; being transported by
the machine; using the machine to pull or push loads; using the machine for cutting non-grass vegetation.
NOTE: The subscription fee is required to operate the product.
D
FG
E
C
A
B
A

 Loading...
Loading...








