20 EN
4. INSTALLATION
4.4.
4.4.1. MINIMUM VIRTUAL BOUNDARY DISTANCES AND DELIMITATION DISTANCES
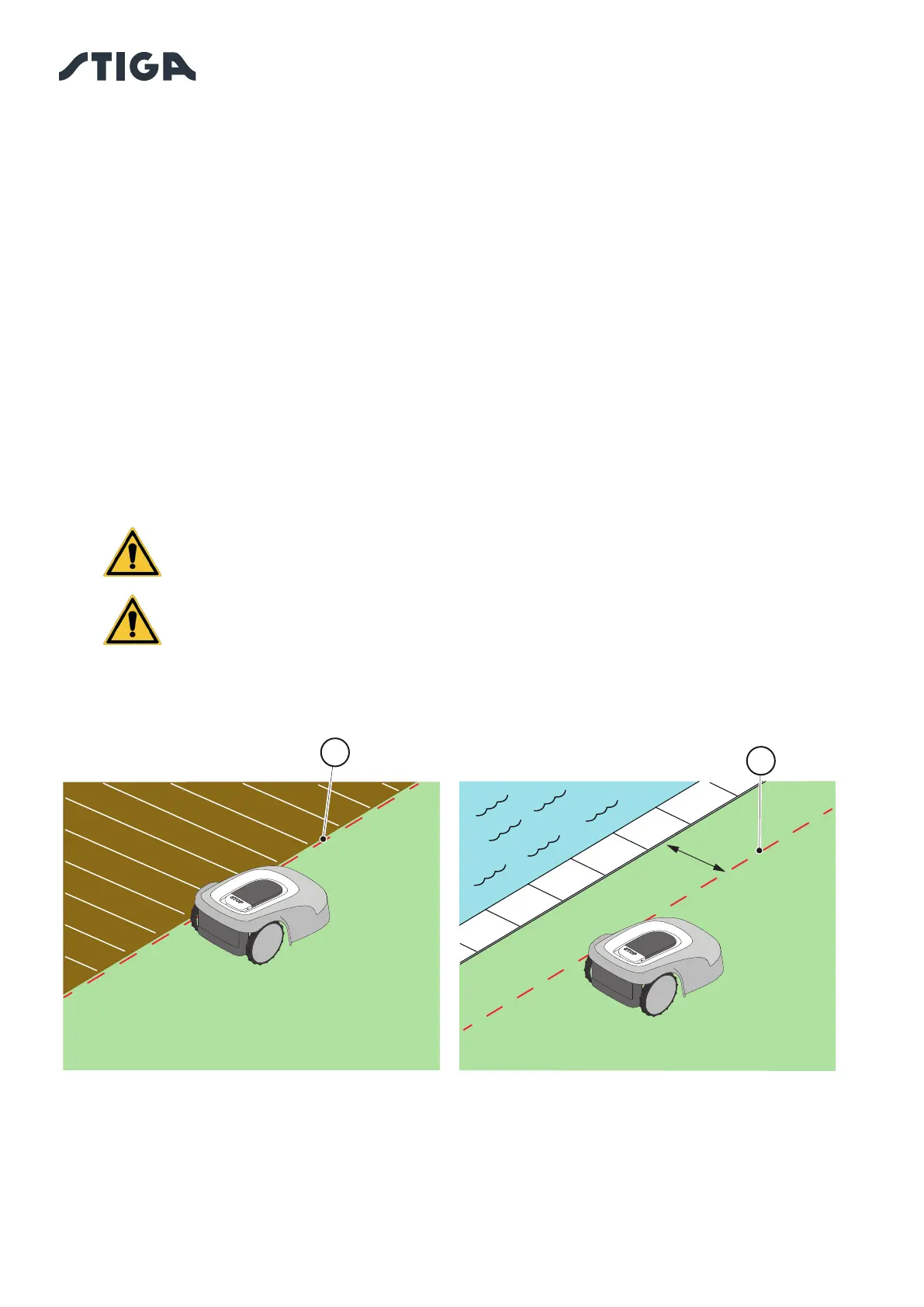
1. If there is a pavement or driveway (A) at the same level as the lawn, the virtual boundary may
coincide with the edge of the pavement. It is also possible to set the virtual boundary by guiding the
robot lawn mower across the edge of the pavement.
2. In the presence of a swimming pool, pond or excavated areas (B) the virtual perimeter must be
programmed at a distance of at least 1 meter. If the pool, pond or excavated area are positioned at
the end of a slope, the virtual perimeter must be programmed at a distance of at least 1.5 meters.
3. In the case of trees with protruding roots (C), the virtual perimeter must be programmed to prevent
the robot lawn mower from passing over such uneven surfaces.
4. The virtual perimeter must be programmed so that the robot lawn mower is kept at a distance of at
least 10 cm from areas with gravel or small stones (D).
5. In the case of sloping areas, follow the instructions provided in par. 4.3.3.
6. In all other cases, the virtual perimeter can be determined according to the size of the machine,
considering a minimum distance of 10 cm between the robot lawn mower and the obstacle.
7. In the case of delimitation of obstacles less than 70 cm apart (F), delimit them as a single obstacle
respecting the distances indicated above.
≥1 m
B
A

 Loading...
Loading...








