22 EN
4. INSTALLATION
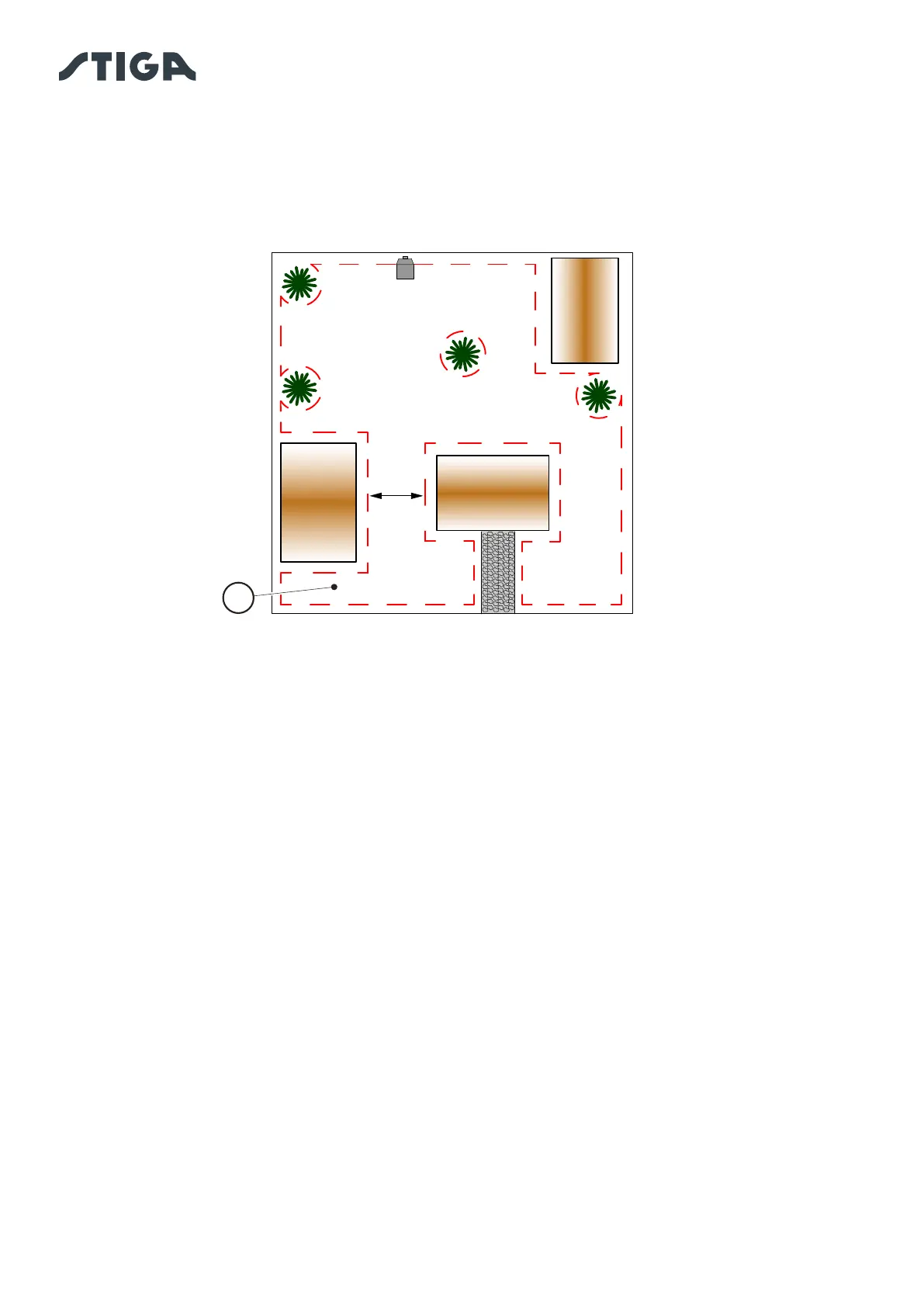
4.4.2.
1. In the case of corridors, the distance between two dierent virtual boundaries must be Z ≥70 cm.
2. In case of a Z pass <70 cm, the area (A) may not be reachable by the robot lawn mower
automatically and in this case it is regarded as a " Closed Area".
4.4.3. RELOCATION ROUTES
If there are areas of the garden that are separated from each other by areas that should not be mowed
or that are not covered with grass, such as gravel paths or hard surfaces located at the same level as the
garden, it is possible to connect the areas to be mowed by relocation routes. The robot lawn mower will
move from one area to another while keeping the cutting device turned o.
The relocation route can also be used to reach the charging base when it is not installed within a work area
1. Assess the possible routes and choose the easiest relocation route that allows the robot to maintain
the furthest distance from any obstacles and that does not cross areas usually used for parking or
the transit of vehicles or pedestrians.
2. The distance between the relocation route and the various obstacles must under no circumstances
be less than 2 meters .
Z
A

 Loading...
Loading...








