2. Dual Robot Calibration
(12) Attach the tool connector to the master robot (Robot 1) as in Figure 2.20.
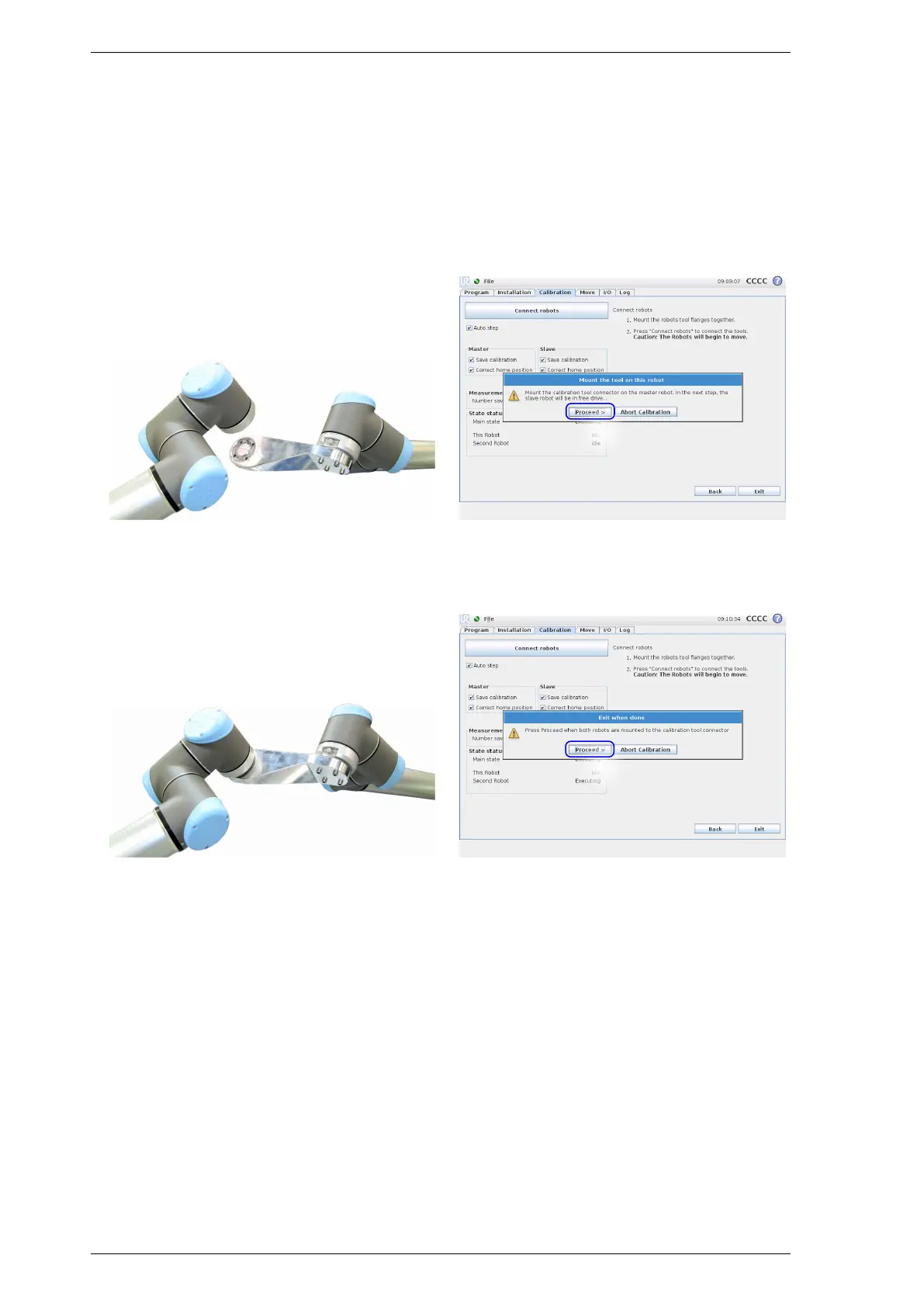
(13) When the tool is mounted on the master robot (Robot 1), Press Proceed in the pop-up Figure 2.21.
(14)
The slave robot (Robot 2) now enters free drive mode. Move the slave towards the connector and attach
the screws with washers. When done it looks like the fully connected robots shown in Figure 2.22.
(15)
When the slave robot (Robot 2) is also mounted on the tool, Press Proceed in the pop-up Figure 2.23. This
step also starts the robot measuring each other by moving around.
12
Figure 2.20: Device connected to the master robot
13
Figure 2.21: Proceed when the tool is mounted on
the master robot (Robot 1)
14
Figure 2.22: Robots fully connected
15
Figure 2.23: Proceed when the robots are connected
16

 Loading...
Loading...







