5.3 Connection Examples for Control of
Motor with External Signal Provider
NOTICE
The following examples refer only to the drive system’s
control card, not the lter.
5.3.1 Start/Stop
Terminal 18 = Parameter 5-10 Terminal 18 Digital Input [8]
Start.
Terminal 27 = Parameter 5-12 Terminal 27 Digital Input [0]
No operation (Default coast inverse)
Terminal 37 = Safe Torque O.
12 13 18 37
130BA155.12
322719 29 33 20
P 5-12 [0]
P 5-10 [8]
Start/Stop
+24V
Speed
Safe Stop
Start/Stop
[18]
Illustration 5.5 Start/Stop Parameters
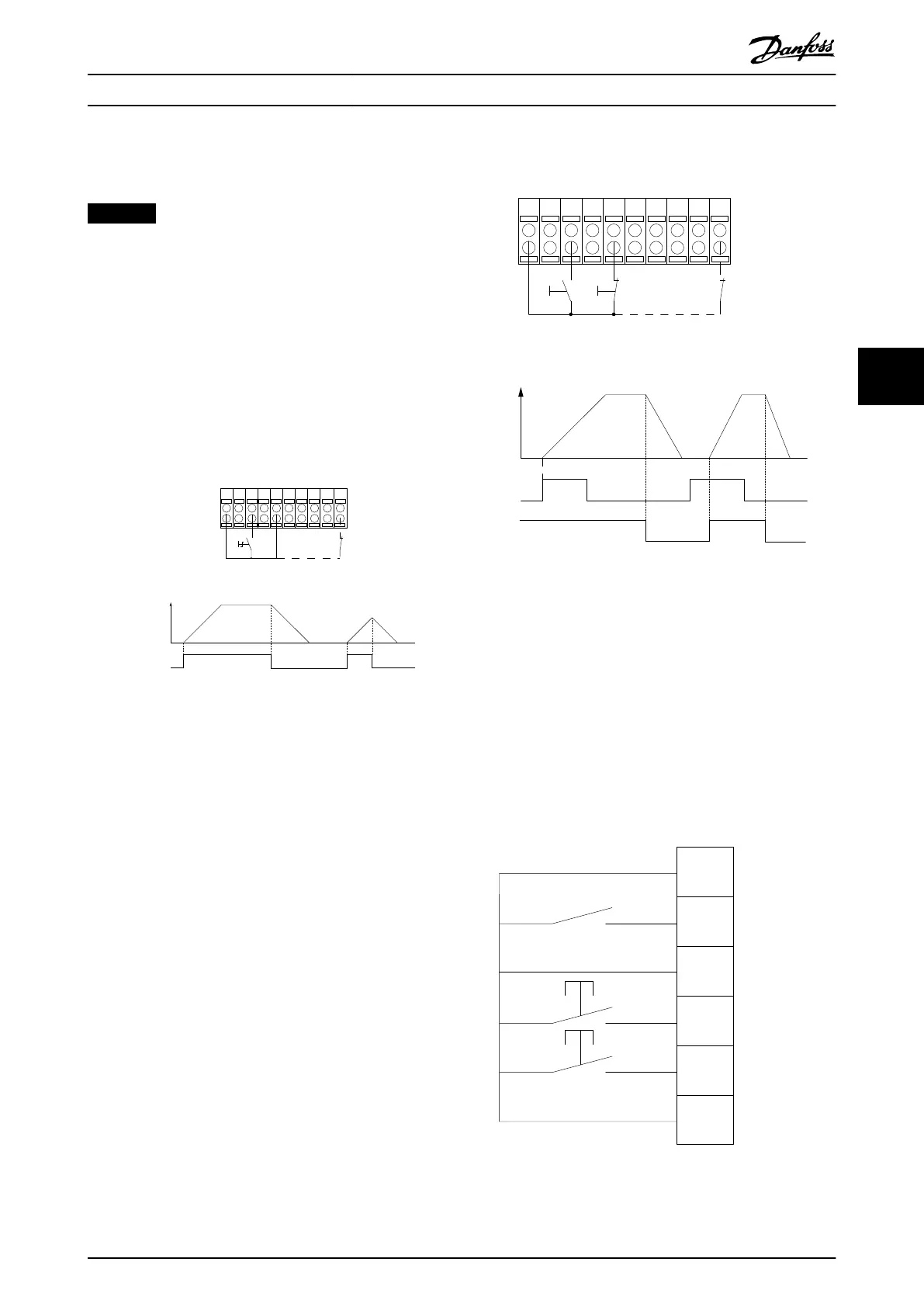
5.3.2 Pulse Start/Stop
Terminal 18 = Parameter 5-10 Terminal 18 Digital Input [9]
Latched start.
Terminal 27= Parameter 5-12 Terminal 27 Digital Input [6]
Stop inverse.
Terminal 37 = Safe Torque O.
12 13 18 37
130BA156.12
322719 29 33 20
P 5 - 12 [6]
P 5 - 10[9]
+24V
Speed
Start Stop inverse Safe Stop
Start (18)
Start (27)
Illustration 5.6 Pulse Start/Stop Parameters
5.3.3 Speed Up/Down
Terminals 29/32 = Speed up/down
Terminal 18 = Parameter 5-10 Terminal 18 Digital
Input [9] Start (default).
Terminal 27 = Parameter 5-12 Terminal 27 Digital
Input [19] Freeze reference .
Terminal 29 = Parameter 5-13 Terminal 29 Digital
Input [21] Speed up.
Terminal 32 = Parameter 5-14 Terminal 32 Digital
Input [22] Speed down.
12
18
27
29
32
37
+24V
Par. 5-10
Par. 5-12
Par. 5-13
Par. 5-14
130BA021.12
Illustration 5.7 Speed Control Parameters
Application Set-up Examples User Guide
MG37L202 Danfoss A/S © 08/2017 All rights reserved. 29
5 5
 Loading...
Loading...













