Chapter 4 Parameters|VFD-EL-W
132
<7,E,1>=1AH
<7,O,1>=0AH,
<8,N,2>=07H,
<8,E,1>=1BH
<8,O,1>=0BH,
*/
for(i=0;i<=16;i++){
while(!(inportb(PORT+LSR) & 0x20)); /* wait until THR empty */
outportb(PORT+THR,tdat[i]); /* send data to THR */ }
i=0;
while(!kbhit()){
if(inportb(PORT+LSR) & 0x01){ /* b0==1,read data ready */
rdat[i++]=inportb(PORT+RDR); /* read data form RDR */
} } }
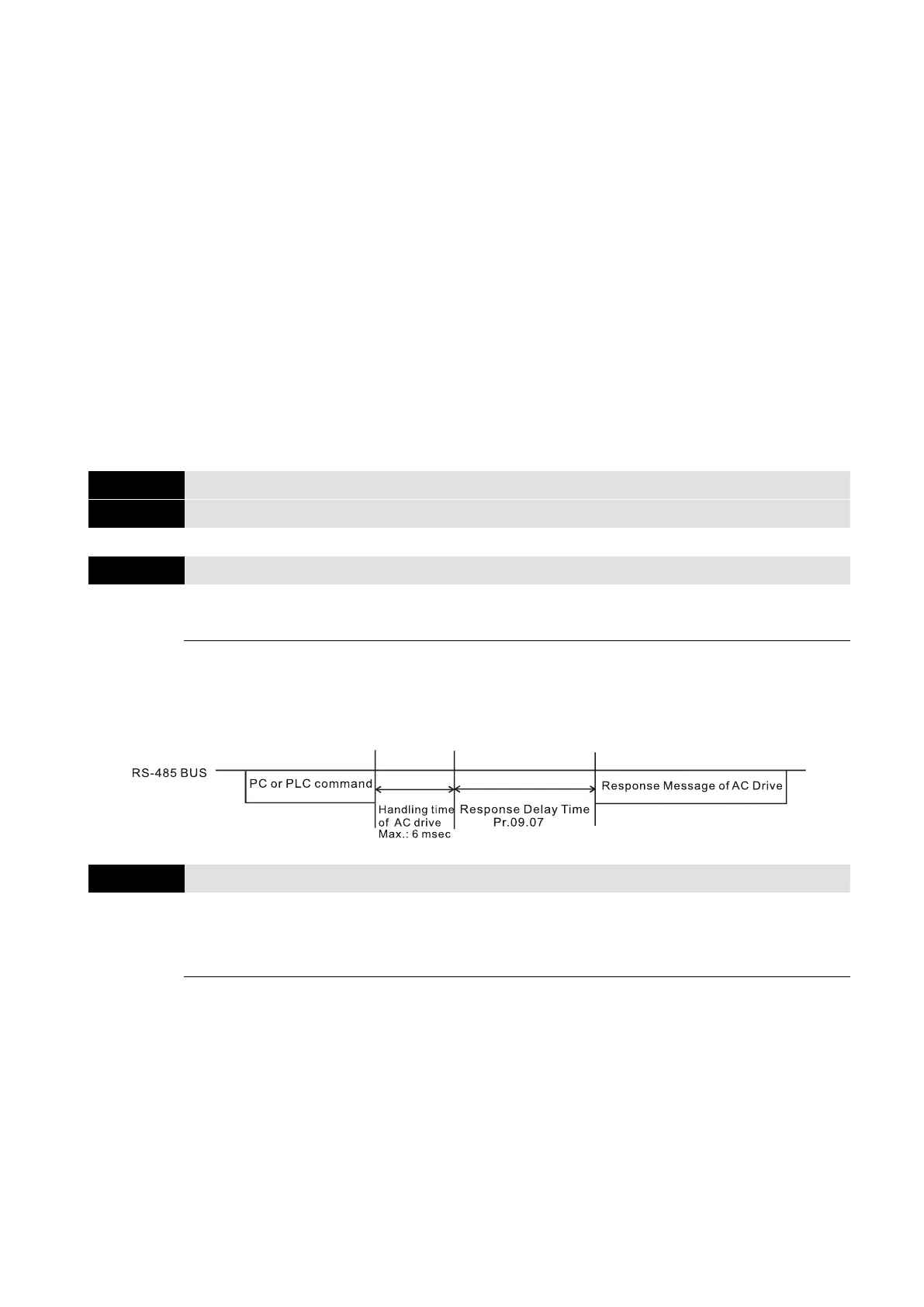
Communication Response Delay Time
If the host controller does not finish the transmitting/receiving process, you can use this
parameter to set the response delay time after the AC motor drive receives communication
command as shown in the following picture.
Communication Keypad Selection
After changing the communication method, you need to power off and reboot the drive, or
unplug the keypad and plug it in again to establish new communication.
 Loading...
Loading...








