6 6
KEB COMBIVERT F4-F
4
Name: Basis
08.03.99
Chapter Section Page Date
© KEB Antriebstechnik, 1999
All Rights reserved
Functional Description Keep on Running Functions
6.6.3 External Error
Control
Procedure
With the external error control procedure units of other manufacturers can take direct
influence on the drive. In order to activate the error control procedure a digital input
di.3…di.12 must be assigned with the value „3“. The behaviour at tripping of an external
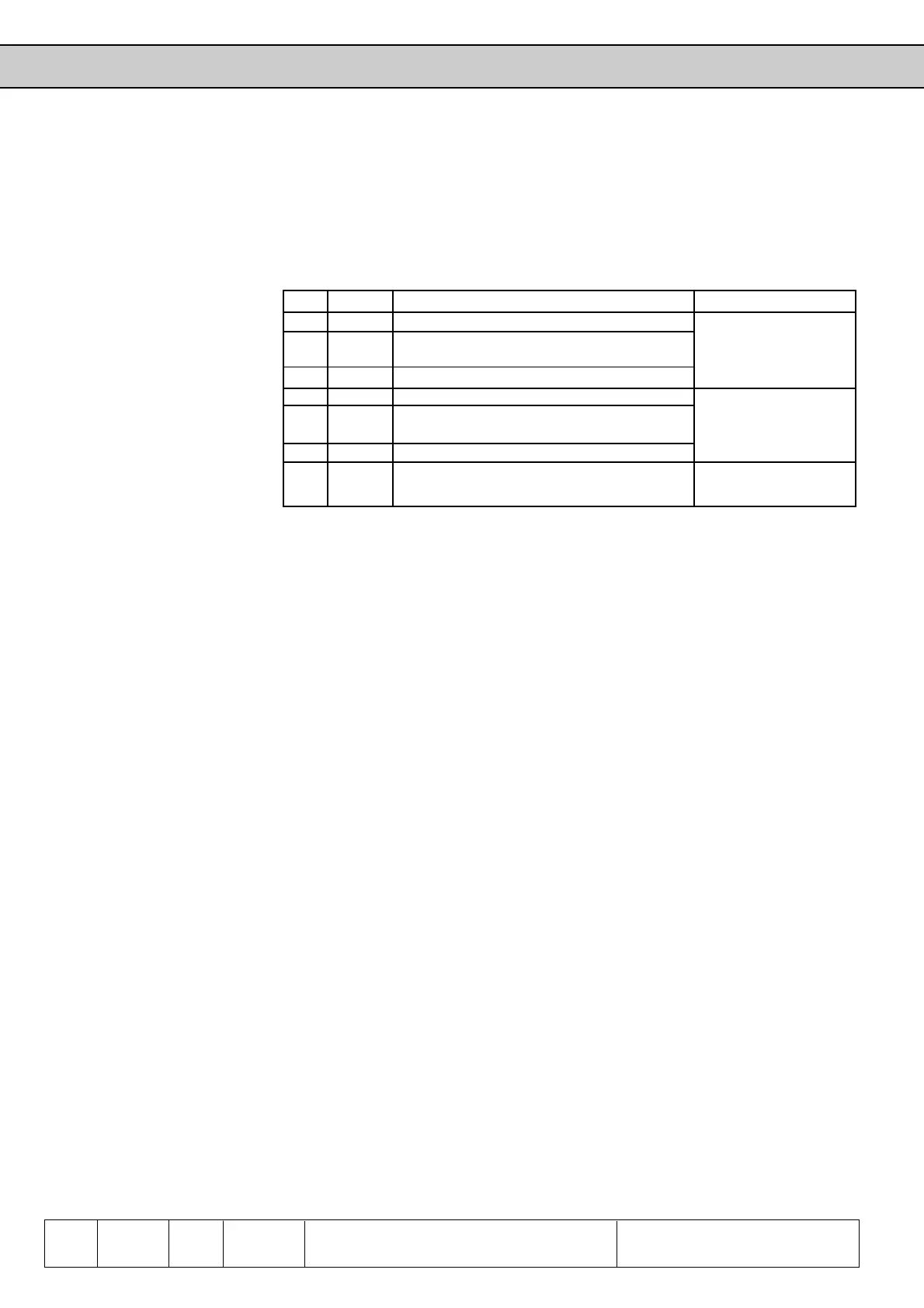
fault is defined with Pn.20 according to following table:
Pn.20 Display Reaction Restart
0 E. EF Immediate disabling of modulation
1A. EFQuick stopping / disabling of modulation
after reaching speed 0
2A. EFQuick stopping / holding torque at speed 0
3A. EFImmediate disabling of modulation
4A. EFQuick stopping / disabling of modulation
after reaching speed 0
5A. EFQuick stopping / holding torque at speed 0
6 keine No effect on the drive;
!Fault is being ignored!
Remove fault;
Actuate reset
Automatic reset, if
the fault is no longer
present
- inapplicable -
Reaction to E. EF (Pn.20)

 Loading...
Loading...
