Troubleshooting and fault elimination
Troubleshooting
8
129
EDK82MV371 DE/EN/FR 7.0
8 Troubleshooting and fault elimination
Troubleshooting
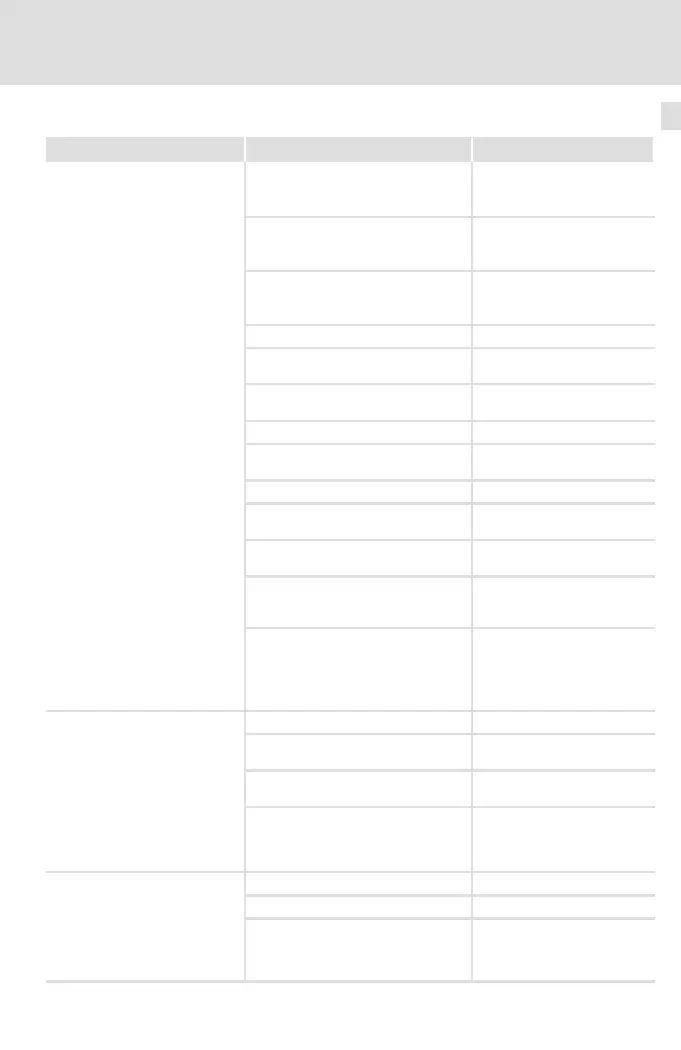
Maloperation Cause Remedy
Motor does not rotate
DC−bus voltage too low
(red LED is blinking every 0.4 s;
keypad displays: LU)
Check mains voltage
Controller inhibited
(Green LED is blinking, keypad display:
)
Deactivate controller inhibit,
controller inhibit can be set
via several sources
Automatic start inhibited (C0142 = 0
or 2)
LOW−HIGH edge at X3/28
If necessary, correct starting
condition (C0142)
DC−injection braking (DCB) active Deactivate DC injection brake
Mechanical motor brake is not
released
Manual or electrical release of
mechanical motor brake
Quick stop (QSP) active (keypad
display: )
Deactivate quick stop
Setpoint = 0 Select setpoint
JOG setpoint activated and JOG
frequency = 0
Select JOG setpoint
(C0037 ... C0039)
Fault active Eliminate fault
Incorrect parameter set active Change to correct parameter
set via terminal
Operating mode C0014 = −4−, −5− set,
but no motor parameter identification
Identify motor parameters
(C0148)
Assignment of several functions
excluding each other to one signal
source in C0410
Correct configuration in
C0410
Use of internal voltage source X3/20
for the function modules Standard
I/O, INTERBUS, PROFIBUS−DP, or
LECOM−B (RS485):
No jumper between X3/7 and X3/39
Jumper terminals
Motor does not rotate smoothly
Motor cable defective Check motor cable
Maximum current set too low (C0022,
C0023)
Adjust settings to the
application
Motor is under− or overexcited Check parameter setting
(C0015, C0016, C0014)
C0084, C0087, C0088, C0089, C0090,
C0091 and/or C0092 not adjusted to
the motor data
Adjust codes manually or
identify motor parameters
(C0148); optimise vector
control
Current consumption of motor
too high
Setting of C0016 too high Correct setting
Setting of C0015 too low Correct setting
C0084, C0087, C0088, C0089, C0090,
C0091 and/or C0092 not adjusted to
the motor data
Adjust codes manually or
identify motor parameters
(C0148); optimise vector
control
 Loading...
Loading...










