Description of the device
12 Snow depth sensor SHM 31, V2.1
3. Description of the device
3.1. Basic principles of the measurement method
The SHM 31 snow depth sensor applies the phase measurement method to precisely measure distances
from objects. In the phase measurement method used here, a laser diode emits short laser pulses, which are
amplitude modulated with a defined frequency. The laser light is scattered to objects and detected with a
photo diode. Unlike the SHM 30 snow depth sensor, when using this method no continuously modulated
laser light is emitted. Instead, individual pulses that are in a fixed relationship to one another are emitted. All
in all, the advantage of the newer method is that the contrast has been improved, thereby reducing the
dependency on background light. The short pulses also mean that no speckle patterns are generated due to
the pulses’ short coherence time, which would otherwise lead to lower precision in the distance
measurement.
The emitted laser light that hits the surface is scattered back towards the sensor in small particles. This part
of the light is compared to a reference signal to measure the distance from the surface. In addition to
measuring the distance, the sensor also evaluates the signal intensity. At OTT HydroMet, the signal intensity
is normalised as a function of the distance during the production process on target plates. The method
enables a rough distinction between surfaces of different reflectivity – to differentiate between snow and
grass, for example. Another purpose of normalisation is to make the sensors comparable with one another.
More information about this can be found in the section entitled: ‘Testing and error descriptions’.
3.
2. Introduction to assembly and commissioning
The snow depth sensor is mounted on a mast using the mast clamps provided. Assembly on a mast
cantilever is also possible, but not necessary. The sensor is aligned in the direction of the surface. The angle
the sensor is assembled at (tilt angle α) should be between 10 and 30 degrees to prevent snow falling from
the mast or the sensor itself from affecting the measured result. If an angle is too large, this causes the laser
beam to hit the ground at too flat an angle, which may give a vague and inconsistent distance measurement
result.
Following installation, the user performs an automatic zero measurement to measure the distance d
0
from
the surface, as well as the installation angle α. The measured values are stored in the internal memory as
reference values; see Figure 10 and Figure 11. An existing snow depth during device commissioning can be
manually communicated to the sensor as an offset value.
T
he snow depth h
1
is calculated according to the following formula:
ℎ
1
= ℎ
− ℎ = ℎ
− () ⋅ cos()
where h
r
is the installation height at the laser exit window and mean(d) is the averaged measured distance
value.
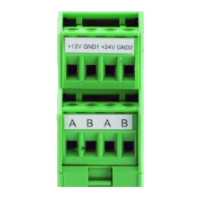
Three interfaces are implemented in the SHM 31 snow depth sensor:
• RS485 (half duplex),
• RS232
• SDI-12
The RS232 interface can always be used at the same time as the RS485 or SDI-12 interface. The SDI-12
and RS485 interfaces use a common connection cable, so they cannot be used together. The device
configuration defines which interface is active.

 Loading...
Loading...