Section 2 - On the Water
CMD-4082082 / 90-8M0052072 eng FEBRUARY 2011 Page 17
Models Drive Angle Electronic Limit—Inboard Turn
All
15°
NOTE: The electronic limit may vary, when set by the OEM, depending on the
propulsion personality and distance between drives.
Maneuvering with the Joystick
!
WARNING
A spinning propeller, a moving boat, or any solid device attached to the boat can cause serious injury or death to swimmers.
Stop the engine immediately whenever anyone in the water is near your boat.
The joystick provides a single lever interface to maneuver the vessel. Operating the vessel with the joystick is well suited for close
quarter and docking operations in most situations. The computer control system automatically calculates the steering angle of
each drive, the throttle level, and the proper gear to push or rotate the boat in a direction corresponding to a joystick movement
or twist. For example, if you move the joystick sideways, the computer control system applies a thrust to the boat in the sideways
direction. Rotating the joystick signals the system to apply thrust forces that rotate the boat around its center. You can move and
rotate the joystick at the same time, allowing intricate movements in tight quarters.
The joystick is proportional, which means that the greater distance from the center that the joystick is moved, the more thrust that
is applied to the boat in that direction, to move the boat.
To maneuver the boat using the joystick:
1. Both engines must be running for the joystick to operate.
2. For best control, trim both drives to the full down position. VesselView will display a reminder when the joystick is initiated.
3. Move both electronic remote control (ERC) levers to the neutral position.
4. Move the joystick in the direction that you want the boat to move, or twist the joystick in the direction that you want the boat
to rotate. The joystick can be moved and rotated at the same time.
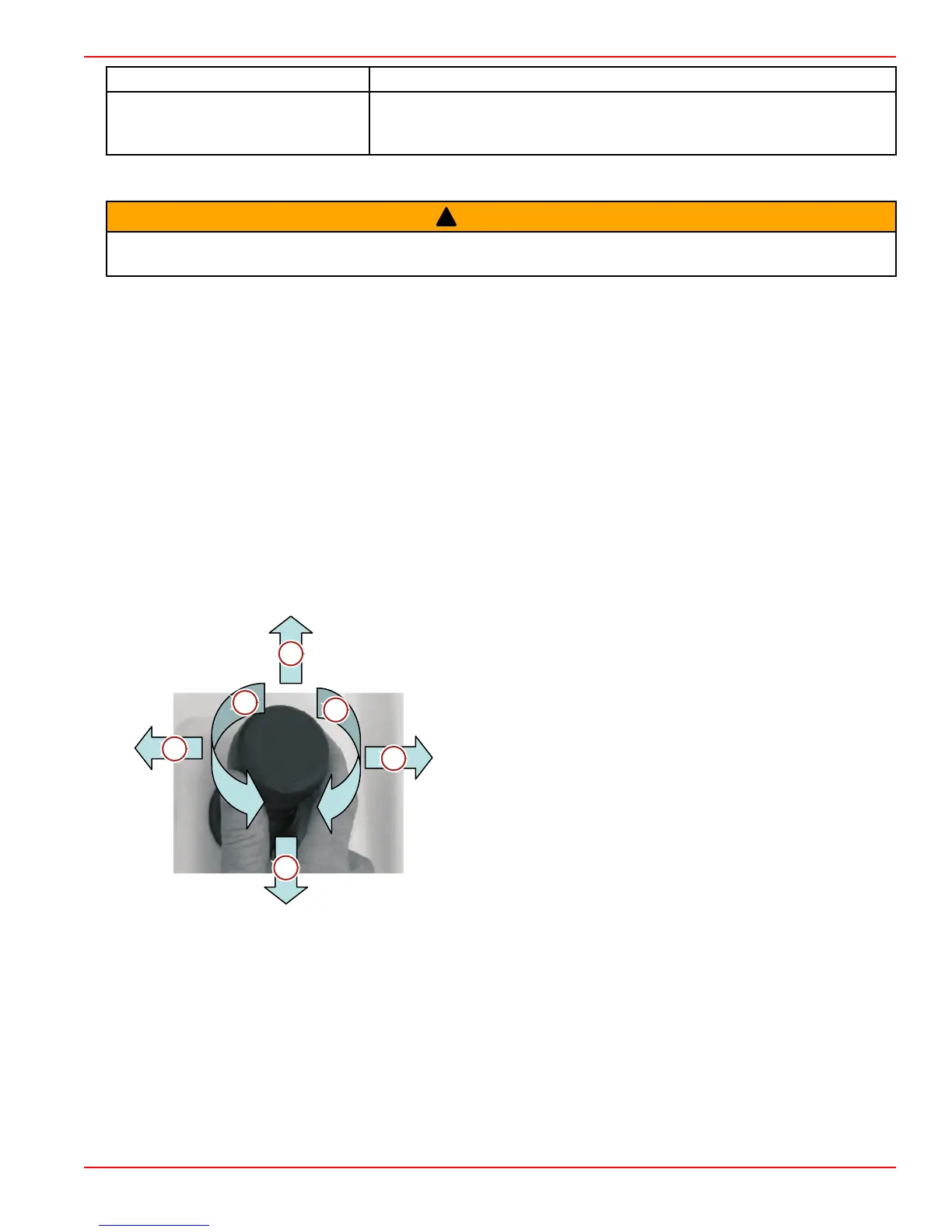
The following picture gives a limited example of the basic responses to inputs from the joystick, and should be used for reference
only. The pictures show an approximate correlation between joystick inputs and the corresponding movement of the vessel. Exact
maneuvers will require multiple joystick inputs and additional user corrections to maintain the maneuver over time.
a - Forward
b - Starboard
c - Reverse
d - Port
e - Port yaw
f - Starboard yaw
The control system automatically attempts to dampen bow and stern swinging (referred to as yaw) during joystick operation. An
on‑board sensor measures the yaw rate of the boat and actively counteracts the yaw motion of the boat. Factors, such as wind,
water conditions or vessel loading, may act upon the vessel beyond the systems capability to correct yaw. Manual yaw correction
may be required when commanding the boat in the fore and aft, port and starboard, or diagonal directions. To correct for unintended
yaw during any maneuver just rotate the joystick in the direction the bow is desired to rotate.
The following table gives an example of the basic response to inputs from the joystick for manual yaw correction.
 Loading...
Loading...
