2 Robot arm
Options 2-31
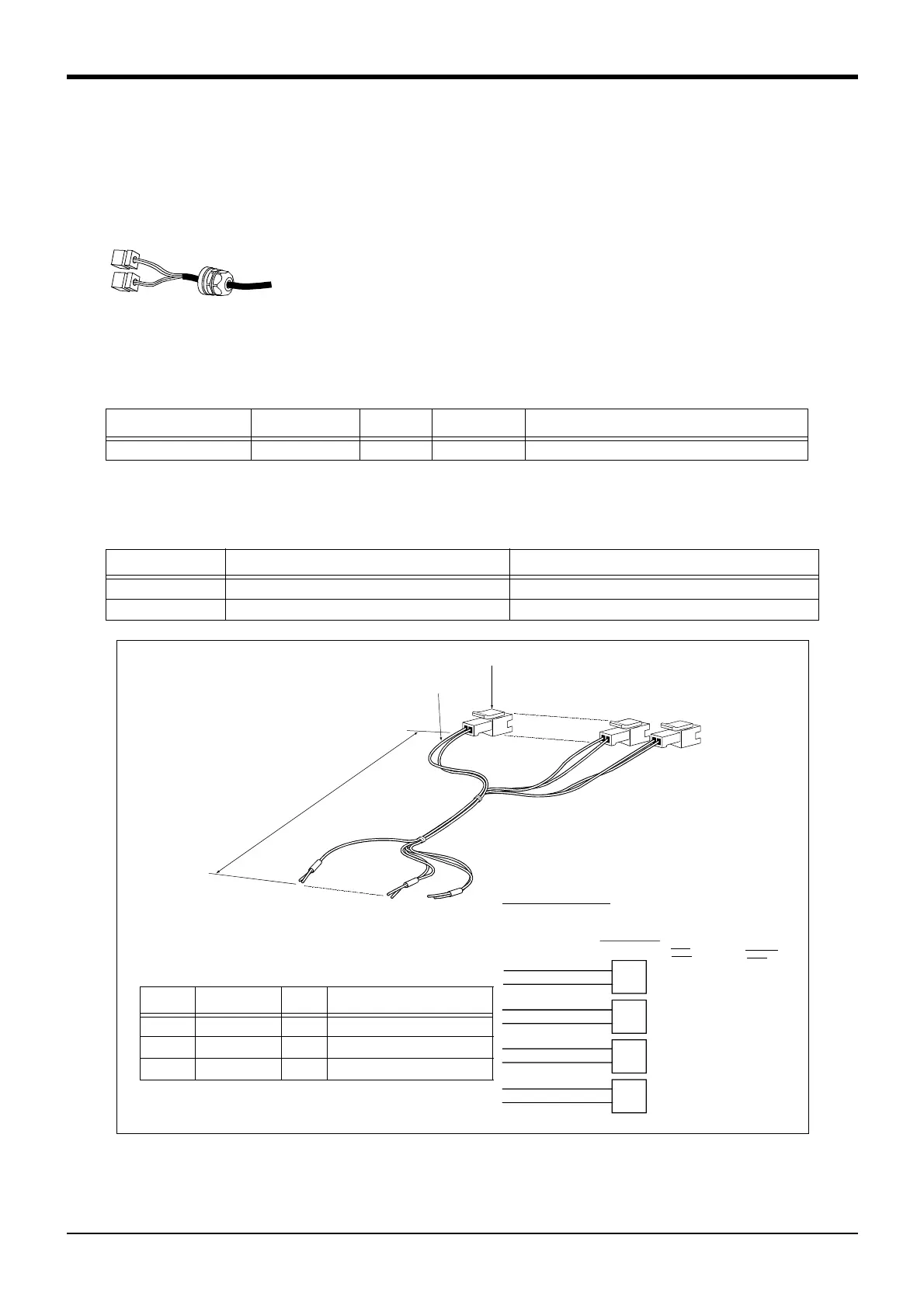
(5) Hand output cable
■ Order type: 1E-GR35S
■ Outline
The hand output cable (solenoid valve connection cable) is an option that is used
when a solenoid valve other than one of the solenoid valve set options, is used.
One end of the cable has a connector that connects to the input terminal inside the
robot. The other end of the cable is connected.
■ Configuration
Table 2-17 : Configuration equipment
■ Specifications
Table 2-18 : Specifications
Fig.2-13 : Outline dimensional drawing and pin assignment
Part name Type Qty.
Mass (kg)
Note1)
Note1) Mass indicates one set.
Remarks
Hand output cable 1E-GR35S 1 cable 0.1
Item Specifications Remarks
Size x Cable core AWG#22(0.3mm
2
)×8 cores One side connector and one side cable connection
Total length 350mm
1
2
1
2
1
2
1
2
GR1
GR2
GR3
GR4
Connector
White
Black
Hand 1 ON
+24V
Hand 1 OFF
+24V
Hand 2 ON
+24V
Hand 2 OFF
+24V
Hand 1 ON
+24G
Hand 1 OFF
+24G
Hand 2 ON
+24G
Hand 2 OFF
+24G
Sink
Source
type
type
general-purpose
output 900
general-purpose
output 901
general-purpose
output 902
general-purpose
output 903
White
Black
White
Black
White
Black
*末端バラ線渡し
3
5
0
*
*
*
(3)
(1)(2)
・ Configuration
Part no. Part name Qty. Specifications
( 1 ) Connector 4 SMR-02V-B
( 2 ) Contact 8 SYM-001T-0.6
( 3 ) Twisted cable 4 AWG#22 (0.3mm
2
)×2 cores
* End cable connection

 Loading...
Loading...



