Omron TM Collaborative Robot S Series: TM12S and TM14S Hardware Installation Manual
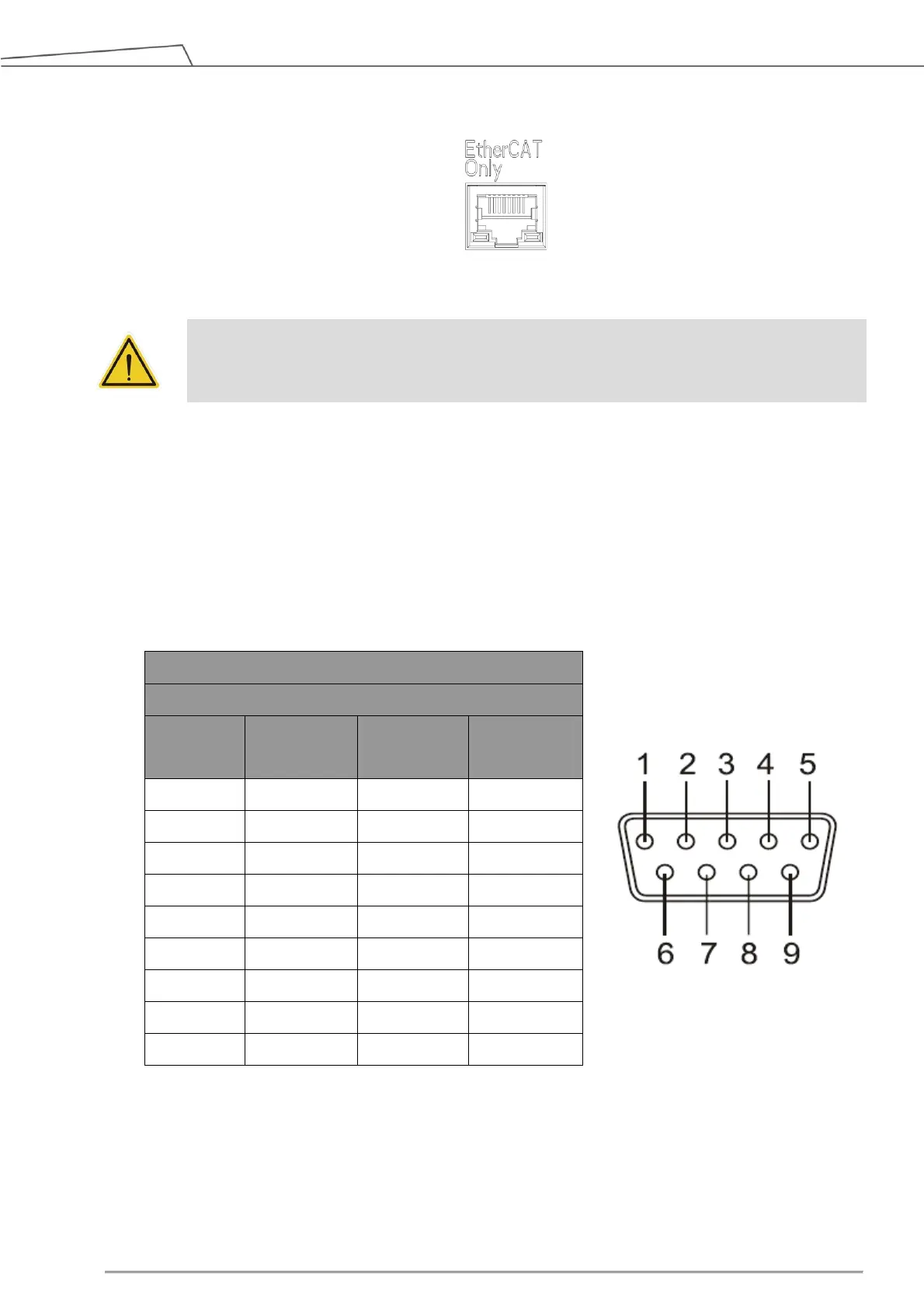
Figure 50: EtherCAT
WARNING:
The robot must be powered off when installing the EtherCAT Slave. Do not plug or unplug the
connector while the robot is on.
5.3.8 USB Port
The USB port of the control box is used for connecting the keyboard, mouse and external storage
devices. External storage devices should only be used for the import/export functions of TMflow. No other
device than those listed above should be connected. Be noted that the external storage device should be
labelled TMROBOT.
5.3.9 COM Port
5.4 Tool End I/O Interface
There is one small connector on the tool end of the robot: The 8-pin connector can be used to configure digital I/O,
analog Input, and RS485.
5.4.1 I/O Terminals
 Loading...
Loading...






