64
action was started is reset and positioning is executed according to the data
set for the positioning action. The Unit will not calculate the present position,
and the No-origin flag (bit 11 of IR n+5) will go ON during operation. The di-
rection of pulse output is determined by the direction bit set for the position-
ing action. START is required in order to resume execution of positioning ac-
tions.
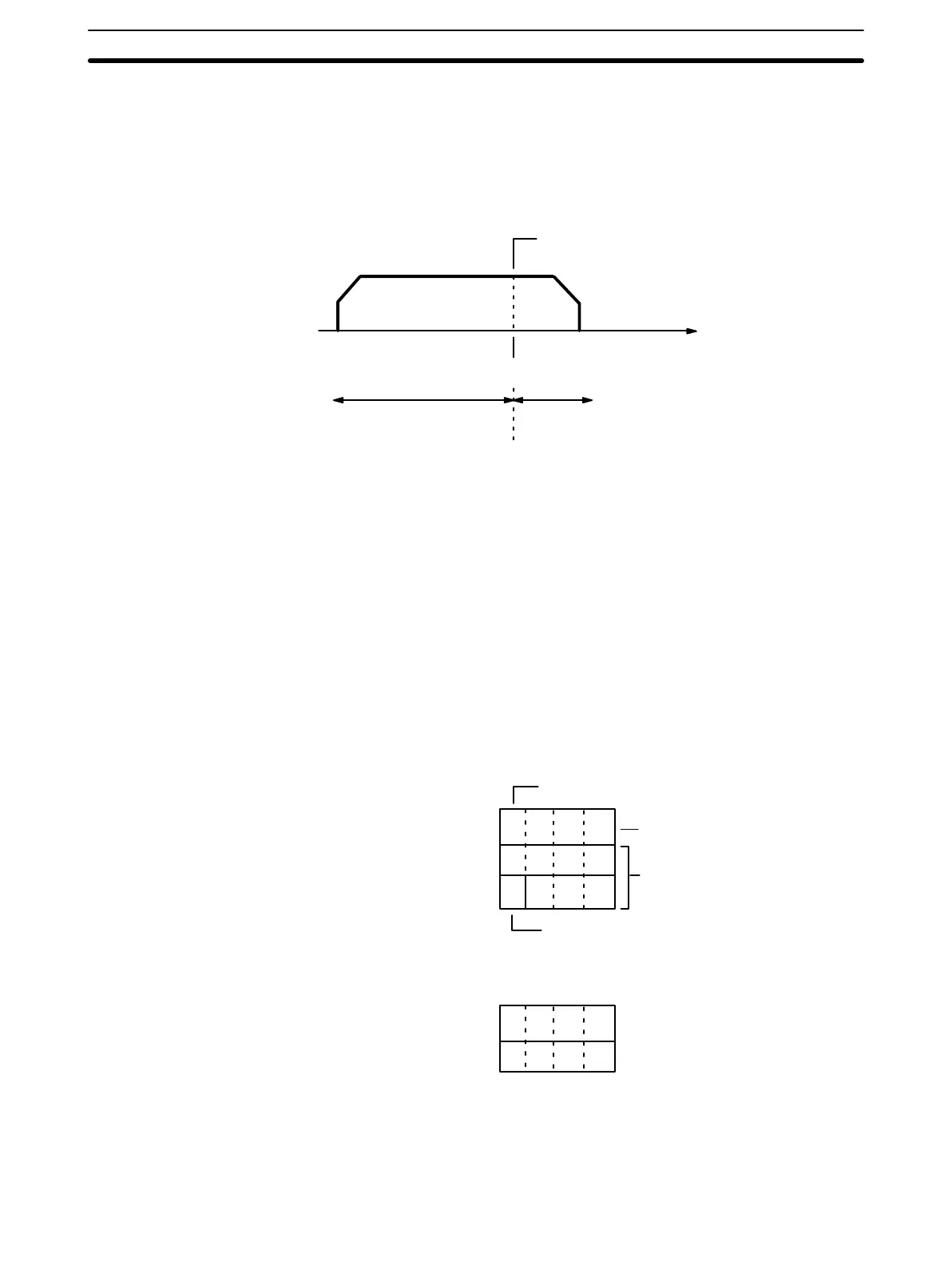
(C) Stop
Time
(A) STOP executed
START
Target speed
CHANGE SPEED valid
CHANGE SPEED cannot be executed.
The extended action can be terminated
by executing STOP again.
(B) Present position reset;
No-origin flag OFF.
Note STOP can be executed by either an external input signal or by IR word n, bit
15. For details, refer to
Section 4–10–1
.
Delay Time
From position A to position B in the above diagram, there is a delay time of
approximately 2 ms for internal processing (scan time). From position B to
position C, there may be a maximum additional delay time of 2 ms. The delay
time between points A and B does not affect the present position set in words
n+8 and n+9. During the delay time between B and C, the present position in
those words is reset to 0 and then updated. The delay time is also output in
those words.
DM 1022 1 0 0 5
DM 1023 0 0 0 0
DM 1024 0 0 0 1
word 108 0 0 0 3
word 109 0 0 0 1
Example: Positioning Action #0 for Unit #0
Target position: 10000
Completion code: 5
Direction: CW
Speed #1: 10K pps
After STOP, the present position is as follows:
In this example, the present position after operation has stopped is 10003.
Since the target position was 10000, the actual position has exceeded the
target position by 3 pulses. Since the speed was set to 10K pps, 3/10,000 =
0.003 s = 0.3 ms. Thus the delay time is 0.3 ms.
Positioning Actions Section 4–2

 Loading...
Loading...




