Rockwell Automation Publication SYSLIB-RM044D-EN-P - February 2017 13
PowerFlex 753 Drive (P_PF753)
PowerFlex 753 Drive Input Structure
Input parameters include the following:
• Input data elements (Inp_) are typically used to connect field inputs from
I/O modules or signals from other objects.
• Configuration data elements (Cfg_) are used to set configurable
capabilities and features of the instruction.
• Command data elements (PCmd_, OCmd_, MCmd_) are used by
program logic, operators, and maintenance personnel to request
instruction actions.
• Setting data elements (PSet_, OSet_, MSet_) are used by program logic,
operators, and maintenance personnel to establish runtime setpoints,
thresholds, and so forth. Set_ data elements (without a leading P, O, or M)
establish runtime settings regardless of role or mode.
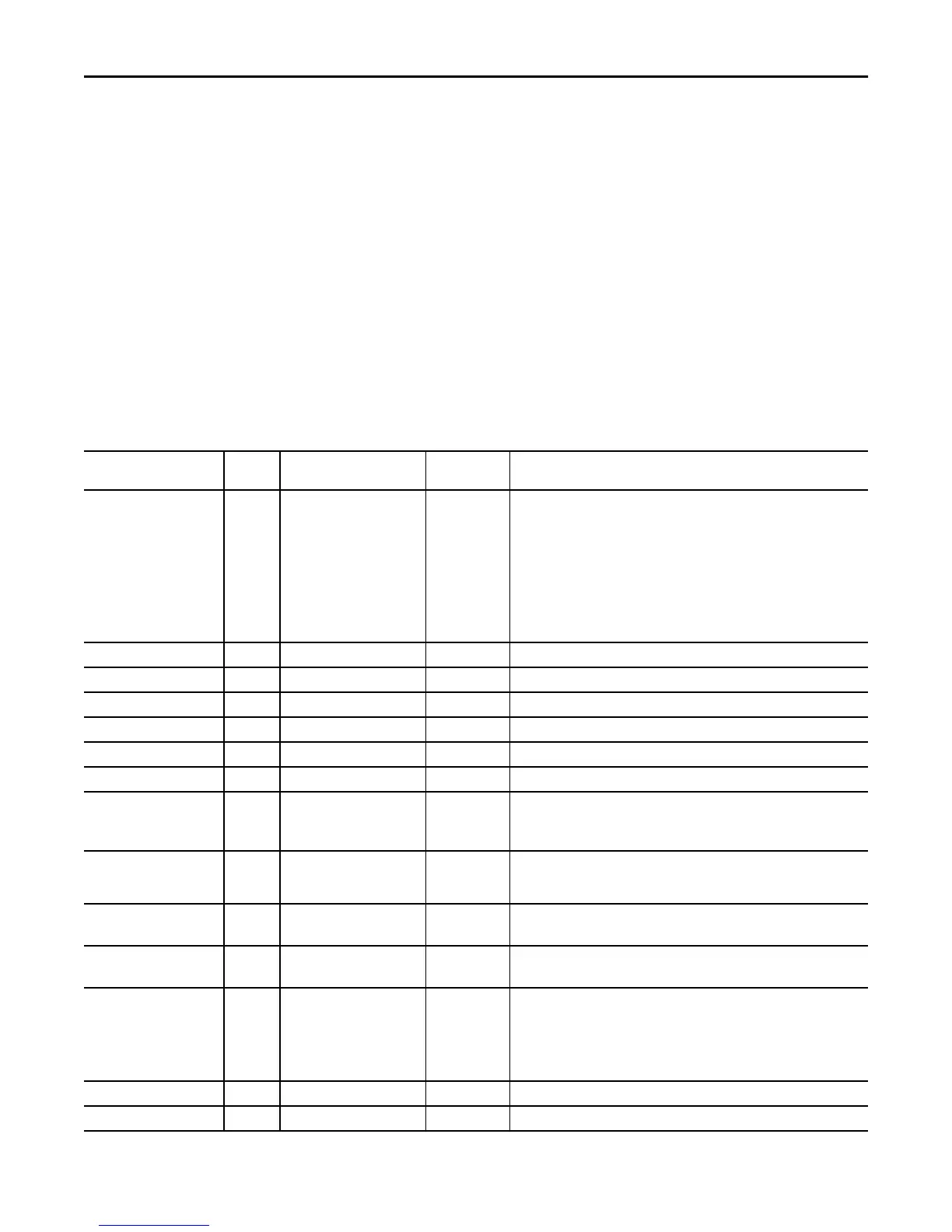
Table 8 - P_PF753 Drive Input Parameters
Input Parameter Data
Type
Alias For Default Description
EnableIn BOOL 1 Ladder Diagram:
If the rung-in condition is true, the instruction’s Logic routine executes. If the
rung-in condition is false, the instruction’s EnableInFalse routine executes.
Function Block Diagram:
If true, or not connected, the instruction’s Logic routine executes. If the parameter
is exposed as a pin and wired, and the pin is false, the instruction’s EnableInFalse
routine executes.
Structured Text:
No effect. The instruction’s Logic routine executes.
Inp_FwdPermOK BOOL 1 1 = Permissives OK, drive can start Forward.
Inp_FwdNBPermOK BOOL 1 1 = Non-Bypassable Permissives OK, drive can start Forward.
Inp_RevPermOK BOOL 1 1 = Permissives OK, drive can start Reverse.
Inp_RevNBPermOK BOOL 1 1 = Non-bypassable Permissives OK, motor can start Reverse.
Inp_IntlkOK BOOL 1 1 = Interlocks OK, drive can start/run.
Inp_NBIntlkOK BOOL 1 1 = Non-bypassable Interlocks OK, drive can start/run.
Inp_IOFault BOOL 0 Input communication status:
0 = OK,
1 = fail
Inp_Sim BOOL 0 Simulation input. When set to 1, the instruction keeps outputs de-energized
(zero) and simulates a working drive. When set to 0, the instruction operates the
drive normally.
Inp_Hand BOOL 0 1 = Request to acquire Hand mode
0 = Release Hand mode
Inp_Ovrd BOOL Mode.Inp_Ovrd 0 1 = Request to Acquire Override mode
0 = Release Override mode
Inp_OvrdCmd SINT 0 Override mode command:
0 = None
1 = Stop
2 = Start Fwd
3 = Start Rev
Inp_OvrdSpeed REAL 0.0 Value to set Speed Reference in Override mode (SpeedRef engineering units).
Inp_Reset BOOL 0 1 = Reset drive fault conditions and latched Alarms.

 Loading...
Loading...






