Figure 12: Object smaller than the laser beam diameter
3.6.6 Scanning range
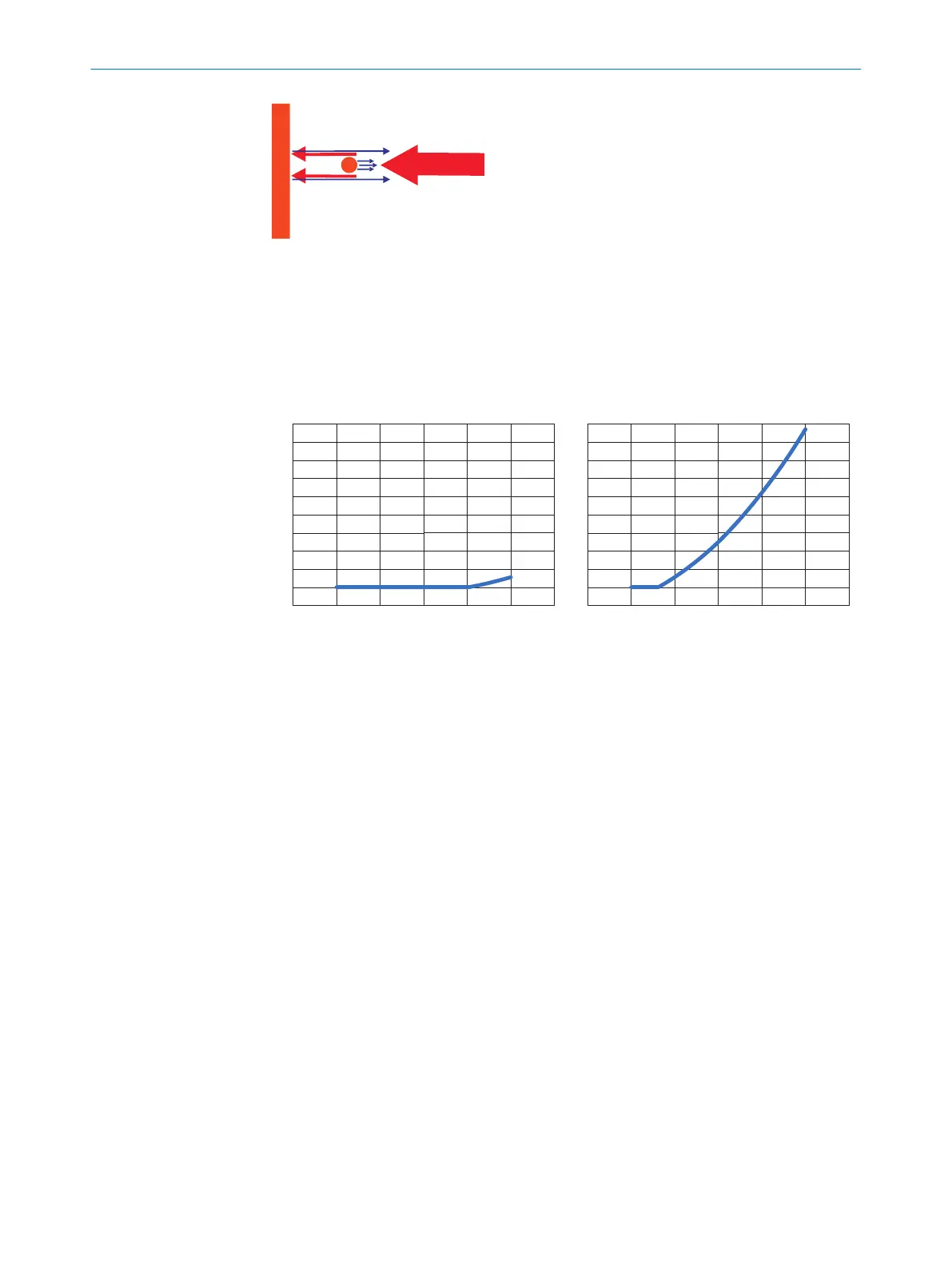
The scanning range of the device depends on the remission of the object to be
detected. The better a surface reflects the incident beam back to the device, the
greater the scanning range of the device.
0
10
20
30
50
60
40
Object remission in % 1
Measuring range in m (ft) 2
0 8
(26.2)
70
90
100
80
4
(13.1)
6
(19.7)
12
(39.4)
2
(6.6)
10
(32.8)
Figure 13: Scanning range as a function of
object remission, TiM55x / TiM56x
1
Object remission in percent
2
Measuring range in meters (feet)
0
10
20
30
50
60
40
Object remission in % 1
Measuring range in m (ft) 2
0 20
(65.6)
70
90
100
80
10
(32.8)
15
(49.2)
30
(98.4)
5
(16.4)
25
(82.0)
Figure 14: Scanning range as a function of
object remission, TiM57x / TiM58x
1
Object remission in percent
2
Measuring range in meters (feet)
3.6.7 Filter
The device has digital filters for pre-processing and optimizing the measured distance
values. They enable the device to be adapted to meet the specific requirements of the
respective application.
The filters can be combined without restrictions. If several filters are active, then the
filters are applied sequentially to the results of the preceding filter. The processing
sequence is as follows:
•
Particle filter
•
Median filter
•
Average filter
The active filter functions affect the output measured values. It is not possible to recal‐
culate the original measured values from the filtered output values. For this reason,
certain combinations of filters might not be advisable.
A particularly effective way to reduce the data in a scan (reduction of measurement
points) is to restrict the scan range (“Data output” > “Output range”) or the media filter.
3.6.7.1 Particle filter
The particle filter blanks small, irrelevant reflection pulses in dusty environments and
in rain or snow which are caused by dust particles, raindrops, snowflakes or the like. In
doing so, successive scans are continuously evaluated in order to detect static objects.
PRODUCT DESCRIPTION 3
8025144//2021-07-21 | SICK O P E R A T I N G I N S T R U C T I O N S | TiM55x/56x/57x/58x
19
Subject to change without notice

 Loading...
Loading...