38 CNT-SVX08F-EN
PID Control
Reverse Action
A controller using reverse action decreases the output when the process variable increases.
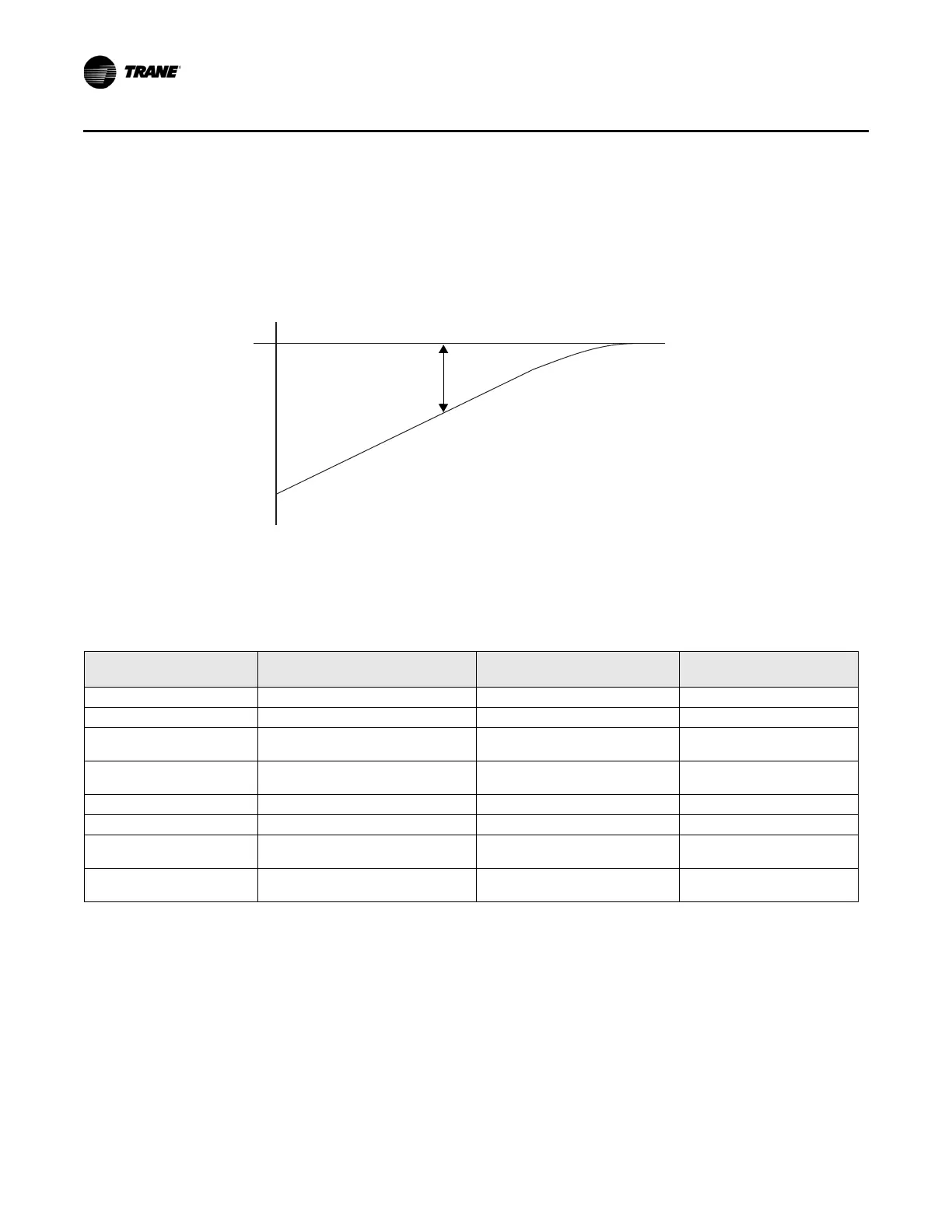
Figure 20 shows the temperature when a system is heating a space. If the error is large and the PID
output is a
t 100%, the actuator and valve combination are fully open. If the process variable (room
temperature) increases, reducing the error, the controller closes the valve to reduce heating. Since
the PID output and process variable move in opposite directions, the loop is reverse acting.
Figure 20. Heating a space
Error
Setpoint
Temperature
Time
Process variable
(temperature)
Determining the Action
Table 9 shows the action settings for several applications. These settings are a good starting place
for most applications.
Table 9. Action settings
Application Output
Actuator Setting at 100%
PID Output Direct or Reverse Acting
Discharge air cooling Valve position 0–100% Completely open Direct
Discharge air heating Valve position 0–100% Completely open Reverse
Duct static pressure
Inlet guide vane position
0–100%
Completely open Reverse
Duct static pressure
Variable frequency drive
0–100%
Completely open Reverse
Building static pressure Supply fan control Maximum fan speed Reverse
Building static pressure Exhaust fan control Maximum fan speed Direct
Discharge air cooling
Electric/pneumatic
5.0–15.0 psi (34–103 kPa)
15.0 psi (103 kPa) Direct
Space temperature
Discharge setpoint
50–100°F (10–37.8°C)
N/A (calculates a setpoint) Reverse
To find the action for other applications, determine whether the actuator and process variable
move in the same direction. If so, then the action is direct. If not, then the action is reversed.
Example 1
An exhaust fan controls the static pressure in a building. The exhaust fan operates at its highest
speed if the PID output is at 100% (when the building pressure is too high). If the pressure goes
above the setpoint, the exhaust fan should speed up to blow air from the building. Therefore, if the
process variable (the building pressure) increases, the actuator increases the fan speed. Since the
process variable and the actuator move in the same direction, the PID loop is direct acting.
 Loading...
Loading...










