All rights reserved 141 Service Manual e-Series (EN) 1.1.8
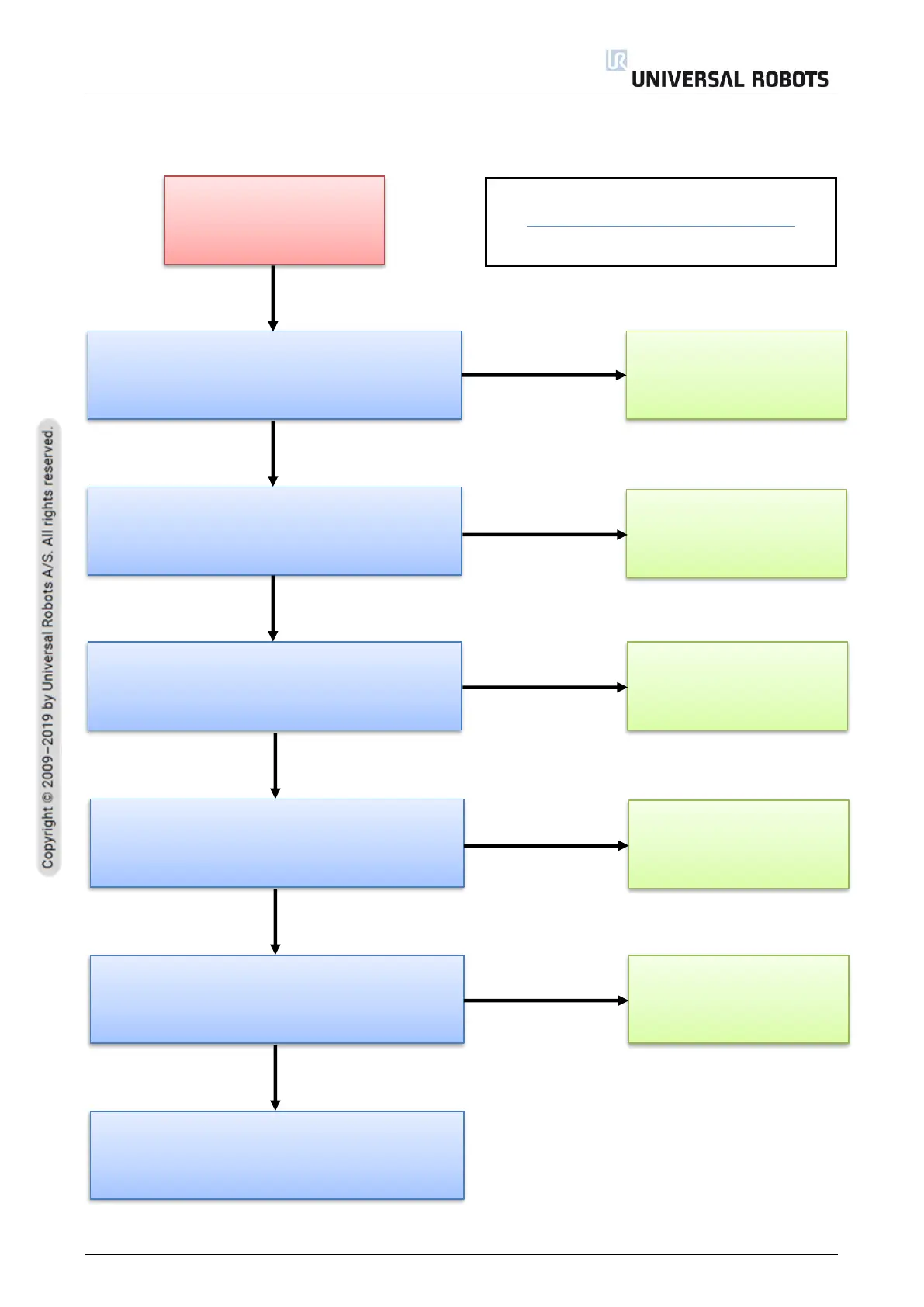
6.6 Protective stop
Protective Stop
Is center of mass very different from TCP point?
Check TCP configuration, payload and mounting
settings it must correspond with actual tool and
robot position.
Are waypoints positioned very close to cylindrical
area around base of robot where robot cannot
operate?
Adjust waypoints away from
this area or reduce
speed/acceleration
Adjust TCP configuration,
payload, mounting settings and
check that safety settings
Adjust center of mass in the
TCP tap or using script code
set_payload()
Is robot moving with excessive speed or
accelerating very hard?
Reduce speed or acceleration
Press free drive button on back of TP and check
the free drive function of all joints > observe any
abnormal friction or behavior observed?
Inspect joint with abnormal
behavior, joint might have
mechanical failure
Contact distributor from where robot has been
purchased
Read also article 18939 on the support site
www.universal-robots.com/support
 Loading...
Loading...










