47
0
1
2
The function is used to suppress fixed oscillation while inverter
is match for motor . If output current varied again and again
while constant load running ,you can adjust the function code
that is base on the factory default value to eliminate oscillation
and make the motor running on an even keel .
This function is used to adjust the carrier frequency of the
inverter . By adjusting the carrier frequency , the motor noise
can be reduced , and the resonance of the mechanical system
can be avoided , so that the leakage current to the earth and
the interference of the inverter can be reduced .
When the carrier frequency is low , the output current higher
harmonic component will increase , the loss of will
increase , and the motor temperature will also
motor
rise increase.
When the carrier frequency is high , the motor is
reduced , and the motor temperature is decreased , but the
inverter and its temperature rise will increase
and so will the interference .
loss of
loss of the
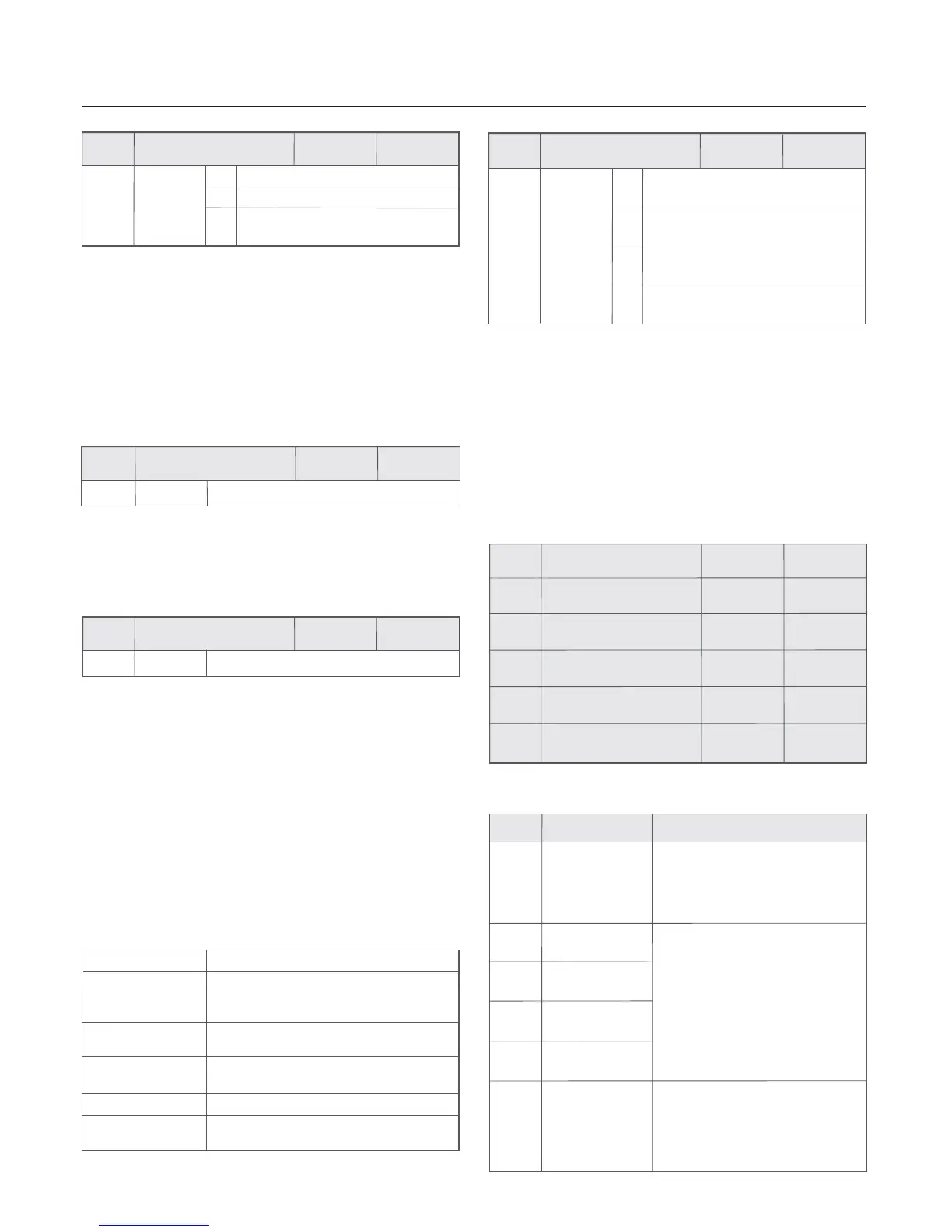
The adjustment of carrier frequency will have influences
on the following performances :
Setup range
Disabled
Enabled
Disabled only at the time of
deceleration
AVR is output voltage regulate automatically , that means
inverter adjusts
and keep the output voltage stable so as to
overcome motor radiation for higher output voltage and
power shortage for lower output voltage. The parameter
can choose the effective session of AVR.
when input voltage fluctuates, the
automatically
When deceleration stopped , AVR selection disabled ,
deceleration time will shorten but running current will
become larger ,when AVR selection enabled , deceleration
time will lengthen but running current will decrease .
Carrier frequency
Motor noise
Output current
waveform
Motor
temperature rise
Leakage current
External radiation
interference
Inverter
temperature rise
low to high
low to high
high to low
poor to good
high to low
low to high
low to high
Automatic Voltage
Regulation (AVR) Selection
Chapter 6 Parameter Description
Model
dependent
0 100~
Setup range
15
Oscillation
suppression gain
F2.11
Model
dependent
1.0 15kHz~
Setup range
Carrier frequency
F2.12
Model
dependent
Factory
default value
2
Carrier frequency
adjustment selection
F2.13
Factory
default value
0
Fixed PWM and carrier frequency
temperature adjustment disabled .
,
Setup range
1
Random PWM and carrier frequency
temperature adjustment disabled .
,
2
Fixed PWM and carrier frequency
temperature adjustment actived .
,
3
Random PWM and carrier frequency
temperature adjustment actived .
,
Two PWM carrier frequency adjustment modes , fixed and
random , are provided . The random PWM motor noise has wide
frequency range , while the fixed PWM motor noise has fixed
frequency .
2
F2.10
When the carrier wave temperature adjustment is enabled ,
the inverter can automatically adjust the carrier frequency
according to its temperature . This function can reduce the
possibility of over heat alarm of the inverter .
F3.00
F3.01
F3.02
F3.03
F3.04
F3.05
Group Input TerminalF3
X1 terminal function
selection
X2 terminal function
selection
X3 terminal function
selection
X4 terminal function
selection
X5 terminal function
selection
X6 terminal function
selection
6
(Forward
rotation Jog)
0
0
0
0
0
Factory
default value
Factory
default value
Factory
default value
Factory
default value
Factory
default value
Factory
default value
0
1
2
3
4
5
This parameter is used to set the function of the
multifunctional digital input terminals .
Setup
value
MS speed
terminal 1
MS speed
terminal 2
MS speed
terminal 3
MS speed
terminal 4
Three-line mode
running control
No function
Function
Even if there is signal input , the
inverter still has no action . The no
operation function can be set on the
unused terminals so as to prevent
error action .
It can realize 16S speed through the
combination of digital status of
these four terminals .
Details about the combination refers
to attached figure 1 .
This terminal is used to realize
three-line control mode of
terminal command. As for detailed
description, please refer to
F3.06 function code .
Description
 Loading...
Loading...