11.3 Adjusting Servo Performance
■ Speed Loop Gain (Cn-0004)
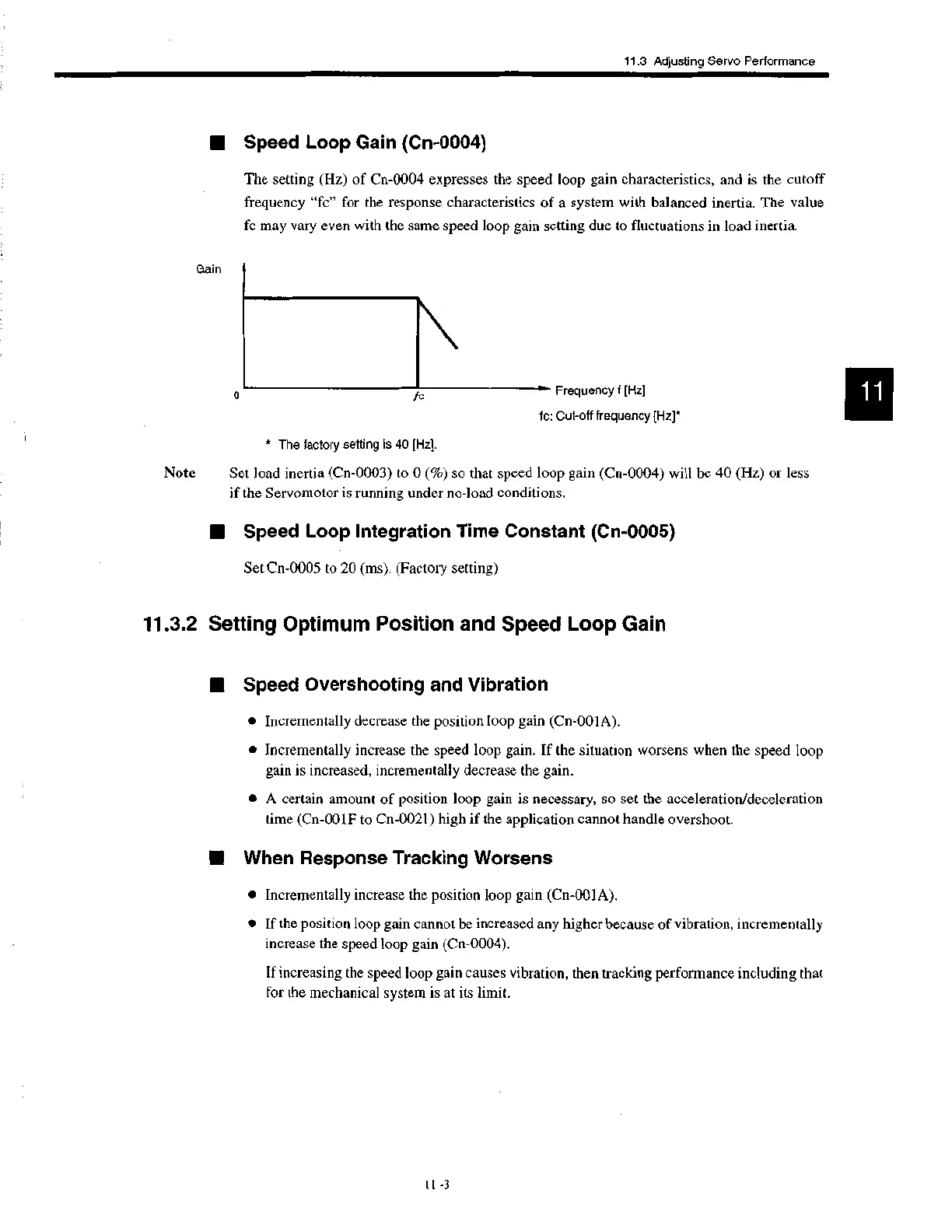
The setting (Hz) of Cn-0004 expresses the speed loop gain characteristics, and is the cutoff
frequency "fc" for the response characteristics of a system with balanced inertia. The value
fc may vary even with the same speed loop gain setting due to fluctuations in load inertia.
Gain
Frequency f [Hz]
fc: Cut-off frequency [1-1z]*
* The factory setting is 40 [Hz].
Note Set load inertia (Cn-0003) to 0 (%) so that speed loop gain (Cn-0004) will be 40 (Hz) or less
if the Servomotor is running under no-load conditions.
■ Speed Loop Integration Time Constant (Cn-0005)
Set Cn-0005 to 20 (ms). (Factory setting)
11.3.2 Setting Optimum Position and Speed Loop Gain
■ Speed Overshooting and Vibration
• Incrementally decrease the position loop gain (Cn-001A).
• Incrementally increase the speed loop gain. If the situation worsens when the speed loop
gain is increased, incrementally decrease the gain.
• A certain amount of position loop gain is necessary, so set the acceleration/deceleration
time (Cn-001F to Cn-0021) high if the application cannot handle overshoot.
■ When Response Tracking Worsens
• Incrementally increase the position loop gain (Cn-001A).
• If the position loop gain cannot be increased any higher because of vibration, incrementally
increase the speed loop gain (Cn-0004).
If increasing the speed loop gain causes vibration, then tracking performance including that
for the mechanical system is at its limit.
 Loading...
Loading...







