7 Alternative calibration
7.0.1 Alternative calibration position
3HAC021111-001 Revision: B 141
7: Alternative calibration
7.0.1 Alternative calibration position
General The manipulator may be calibrated in alternative positions. The regular calibration instruc-
tions detailed for each axis are intended for calibration position 0, i.e. the normal position
Calibration instructions for alternative positions are detailed in Alternative calibrating on
page 128.
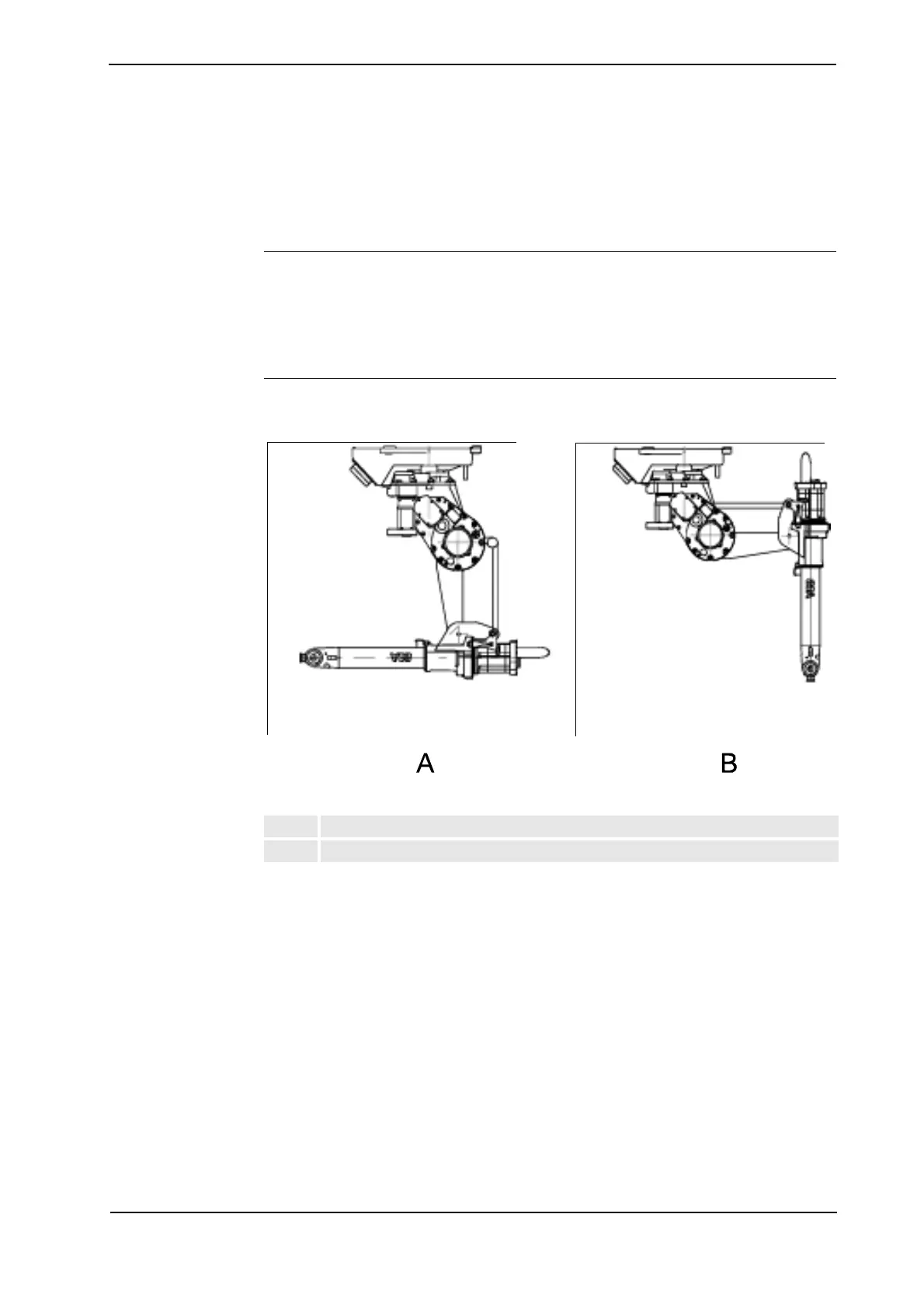
Illustration The illustration shows the available calibrating positions of a suspended robot.
xx0400001020
A Calibration program Normal, calibration position 0 (axes 2 and 3)
B Calibration program Hanging, calibration position -1.570796 (axes 2 and 3)