2 Installation and commissioning
2.1.3 Assembling the robot
3HAC021111-001 Revision: B 37
2.1.3 Assembling the robot
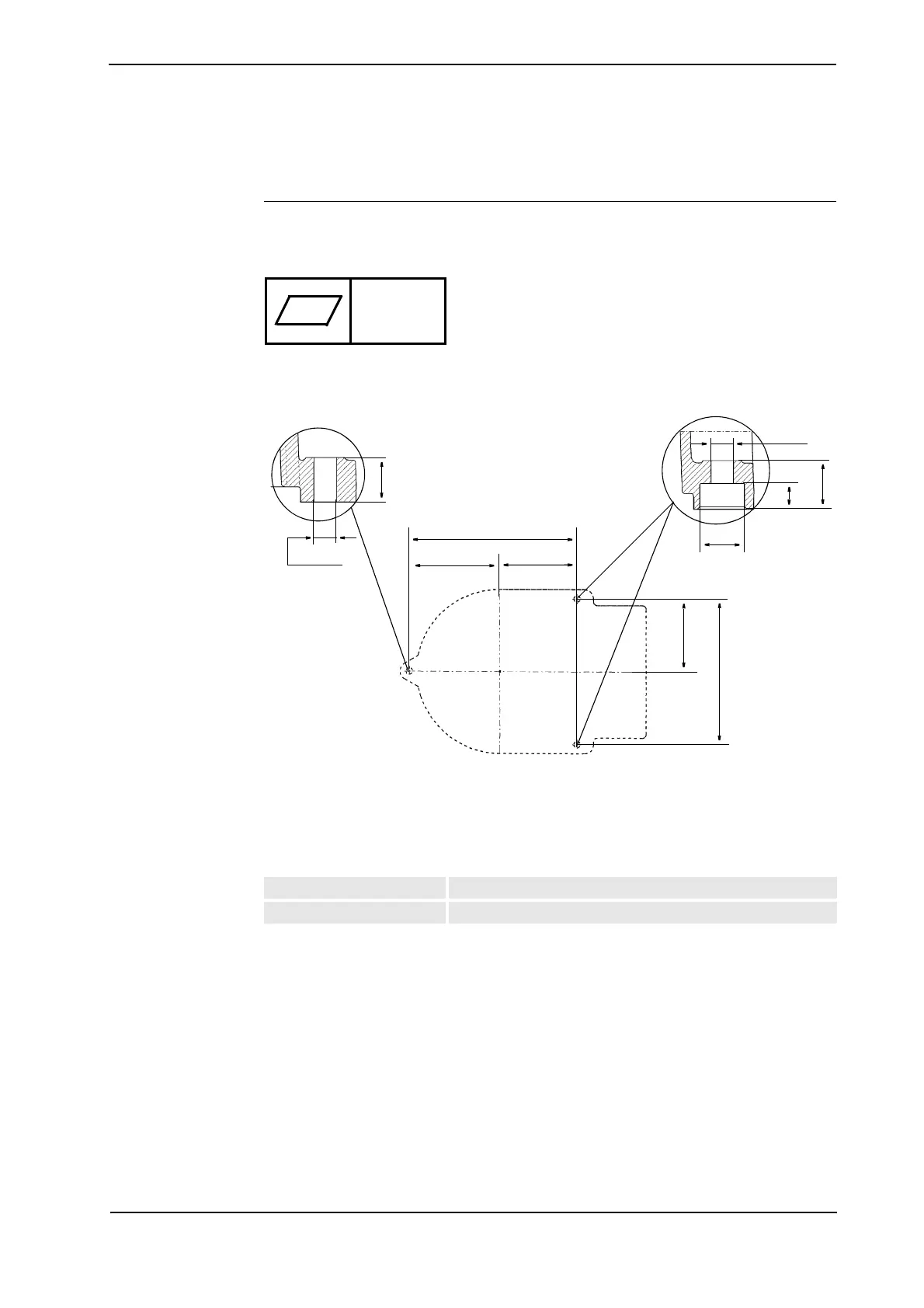
Manipulator The manipulator must be mounted on a level surface with the same hole layout as shown in
Figure . The levelness requirement of the surface is as follows:
.
Bolting down the Manipulator.
The manipulator is bolted down by means of three M16 bolts.
Two guide sleeves, ABB art. no. 2151 0024-169, can be fitted to the two rear bolt holes, to
allow the same robot to be re-mounted without having to re-adjust the program.
When bolting a mounting plate or frame to a concrete floor, follow the general instructions
for expansion-shell bolts. The screw joint must be able to withstand the stress loads defined
in this chapter, Section 2.1.5 Stress Forces.
Suitable bolts M16 8.8
Tightening torque 190 Nm
0.5
∅ 18,5
∅ 35 H8
38
20
455
210
35
∅ 18.5 H7
200
400
245

 Loading...
Loading...








